|
|
|
|
News The Project Technology RoboSpatium Contribute Subject index Download Responses Games Gadgets Contact R4 - ConstructionOperating manual R4Control R4 The Video about R4Parts list
Mechanics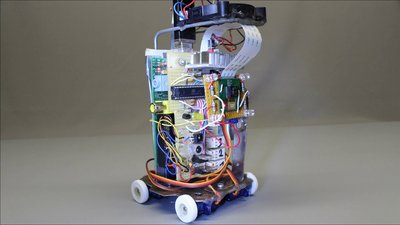
The central brain of R4 is a Raspberry Pi, a low cost single board computer. The dimensions are approximately: 9 x 9 x 22cm (LxWxH) including power pole. 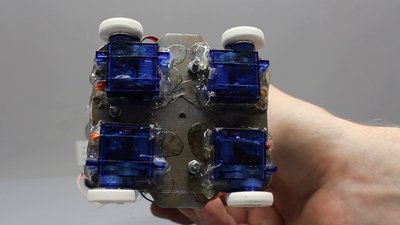
Four Servos, modified for continuous rotation are used as drive. 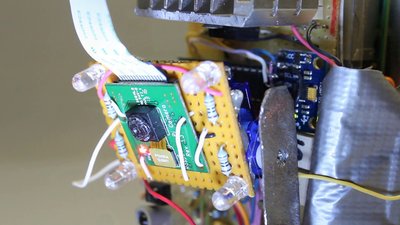
Servo number 5 controls the camera angle. 
The electricity runs through a power with anti twist mechanism at the top of the rover. Electronics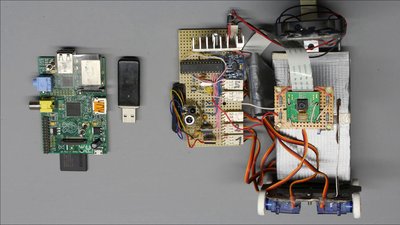
A Raspberry Pi and an Atmel328P are used to control the robot through WLAN. 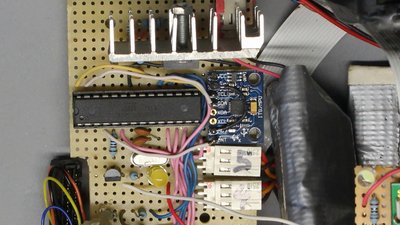
This is the first robot that has sensors. I am using a MPU6050 board that is connected to the Atmega 328P to detect rotational movement. 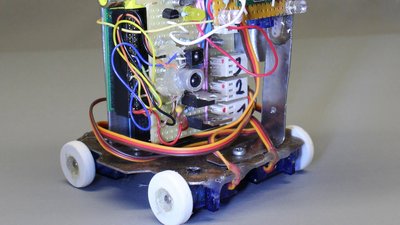
Through the infrared interface the robot can communicate with other microcontrollers. 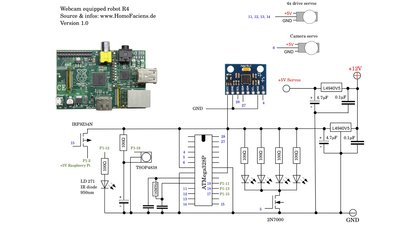
Circuit layout. The infrared interface is not used in the simplified software package, thus you can omit TSOP4838 and LD271. Software packageYou can download a simplified software package in the column Download. The file README.txt contains the instructions for installing and configuring the software.News The Project Technology RoboSpatium Contribute Subject index Archives Download Responses Games Links Gadgets Contact Imprint |
|
|