Figure 1:
Rover number 5 is my first robot for outdoor operations. It is the prototype for a global explorer. During test drives I want to find the weak points of the construction before its successor can start a relay "race" around planet earth.
Parts list
Device
Number
Remark
Plywood
See construction plan for dimensions
Chassis
Board
1
Base plate for microcontroller and peripherals.
Raspberry Pi
1
Internet connection
ATMega328P
with Arduino Bootloader
1
Analog inputs, battery management
2N7000
4
Headlight switches
IRF9Z34N
1
Battery cut off transistor
Double H bridge
e.g. L298N
1
Motor control
Geared DC motors
6
Drive motors
Total current of 3 motors must be below 2A when using L298N bridges
L4940V5
1
5V voltage regulator
Resistors
7x 100kΩ
1x 33kΩ
4x 100Ω
Capacitors
2x 15pF
1x 0.1μF
1x 4.7μF (electrolytical)
LEDs
14
Headlight
Servo
1
Camera
Camera
1
USB camera or Raspberry Pi camera module
Construction
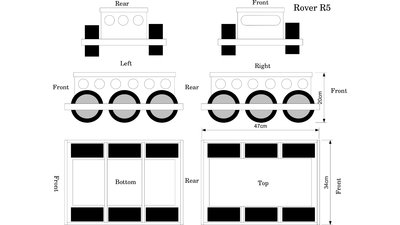
Figure 2:
R5 is made of 6mm poplar plywood. The wheels are from an old RC car with the dimensions 12 x 5.5cm.
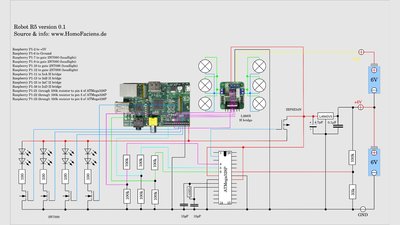
Electronics
Figure 3:
Weak points
Open Gears:
Sand grains locked the gears quickly during test drives. The transmission must be sealed.
Brushed motors:
Brushless motors grant a higher reliability and the current is lower whenever motors get stalled.
Front window:
The window must be larger to give the camera a wider field of view.
Batteries:
The capacity should be higher to increase operating time.
Solar cells:
the solar cells on top of the rover must be used to charge all batteries (not only one out of two lead acid batteries).