|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< R11 Raspberry Pi R13 Mini-Stepper >>> R12 - KonstruktionDas Video zu R12Mechanik
Die Mechanik von R12 besteht aus 3mm Aluminium, das ich mit meiner CNC v3.2.2 ausgefräst habe. 
Per Mini-PCI WLAN-Karte ist die IOT2020 an ein Netzwerk angeschlossen. Gesteuert werden kann der Roboter per Browser-Interface. ElektronikTeileliste:Die elektronischen Bauteile habe ich von meinem Sponsor RS Components erhalten, daher verweisen die Links in der Tabelle zu deren Online-Shop.
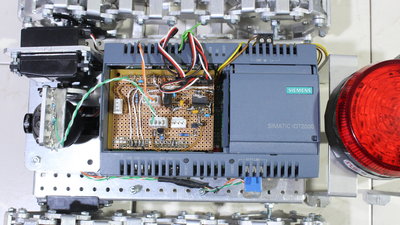
Die Elektronik ist auf einer kleinen Platine verlötet, die direkt auf die GPIOs der IOT2020 gesteckt werden kann. Auf der Platine habe ich zwei Linearregler verbaut, allerdings wird nur einer benötigt. 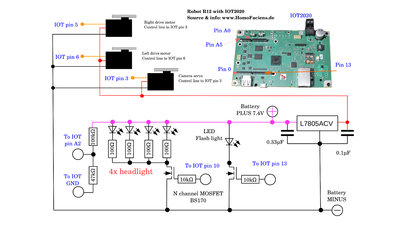
Schaltplan: Die elektrische Energie wird aus einem 7.4V 2000mAh Akku bezogen, womit mehr als eine Stunde Dauerbetrieb möglich ist. Die rote Warnleuchte (LED flash light) ist optional. 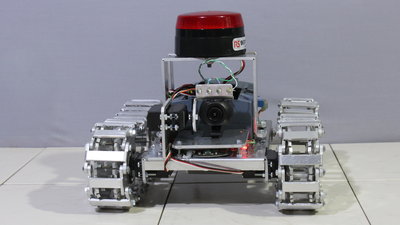
Als Kamera zur Bildübertragung zum Browser verwende ich eine LAN IP Kamera Typ ACM-3601. 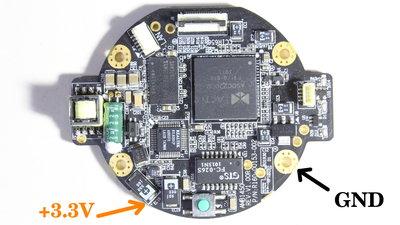
Normalerweise wird diese Kamera per PoE mit elektrischer Energie versorgt. Ich verwende den +3.3V und einen der GND Pins der IOT2020, die mit den beiden Punkten auf der Platine der Kamera verbunden sind. SoftwareDie von mir verwendete Software (experimentell) inklusive Installationsanleitung und Schaltplan gibt's als Download-PaketTestfahrtenR12 ist ein Rover, den ich zu Makertreffen mitnehme. Wer mich dort besucht, kann eine Runde mit dem Roboter fahren. Andere Roboter könnt ihr in meinem RoboSpatium steuern.<<< R11 Raspberry Pi R13 Mini-Stepper >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|