|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< R12 IOT2020 R14 pi-top[4] >>> R13 - KonstruktionDas Video zu R13Mechanik
Die Mechanik von R13 habe ich im Zuge meines Testberichts zum Creality CR-10V2 aus PLA gedruckt. Es handelt sich um ein sehr kompaktes Design. Der Vorteil beim Druck kleiner Teile ist, dass man die Restmeter auf diversen Filamentspulen aufbrauchen kann - das Ergebnis ist ein recht bunter Rover. 
Die Mechanik bildet das Skelett des Rovers - wer genau hinsieht, erkennt, dass ich im Zuge des Zusammenbaus ein paar Teile überarbeitet und hinzugefügt habe. 
Die Stromversorgung erfolgt über zwei Schleifkontakte, die eine Verbindung zu je einem Metallgitter für Masse und positive Versorgungsspannung herstellen. Davon befindet sich einer am Boden und wird über die Schwerkraft angepresst,... 
...während der zweite Schleifer auf der Oberseite des Fahrzeugs über eine Feder vorgespannt wird. 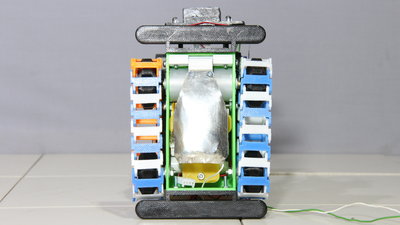
Die Schrittmotoren treiben die beiden Vorderräder an, die Hinterräder werden über die Ketten mitgedreht. Der Roboter ist nicht sonderlich schnell, womit das Unfallrisiko minimiert wird - die kinetische Energie bewegter Objekte steigt quadratisch mit der Geschwindigkeit. 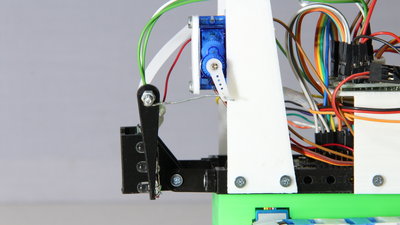
Das Micro-Servo schwenkt die Kamera nach oben oder unten. Die LEDs sorgen für gute Beleuchtung in dem mit unter dunklen Roboterraum. Teileliste: Die elektronischen Bauteile habe ich von meinem Sponsor Gearbest erhalten, daher verweisen die Links in der Tabelle zu deren Online-Shop.
Elektronik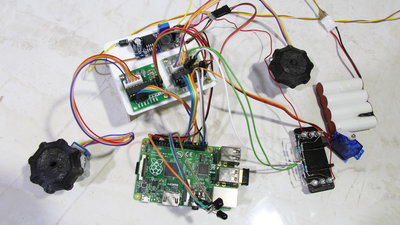
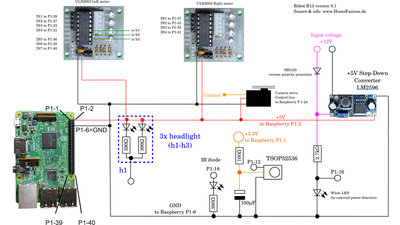
DownloadSchaltplan und die 3D Dateien der Mechanik sind Bestandteil des Download-Paketes (1.7MB).TestfahrtenIn meinem RoboSpatium könnt ihr die Steuerung von R13 übernehmen.<<< R12 IOT2020 R14 pi-top[4] >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|