|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt CNC V3.x SerieSelbst replizierende CNC für 194 (oder mehr) LänderDiese Serie von CNC Maschinen ist eine Einreichung zum HackadayPrize2016.Auf Hackaday ist dieses Projekt zu finden unter: Self replicating CNC for 194 (or more) countries.
Ich bin in die Finalrunde des HackadayPrize2016 eingezogen! Das Promotion Video zum diesjährigen HackadayPrize.Ich habe bereits einige CNC-Maschinen (Plotter, CNC v0.5, CNC v0.6, CNC v2.0, CNC v2.1) unter Verwendung einfacher Materialien und Werkzeuge konstruiert und veröffentlicht. Oft wurde ich gefragt, welche Motoren oder Elektronikkomponenten als Alternative zu den Vorgaben in meinen Plänen verwendet werden könnten, besonders von Machern aus Ländern ohne Möglichkeit der 24-Stunden-Expresslieferung. Weiterhin wollten viele Bastlerkollegen eine vollwertige 3-Achsen-Maschine anstelle des Servos, das ich in einigen Maschinen als vertikale Achse verwende. Ebenso wurde die Möglichkeit zur Verwendung alternativer Software wie grbl nachgefragt, weshalb Step / Direction Pins in die Elektronik implementiert werden sollte. Nun möchte ich all diese Eckpunkte (und mehr, wenn ihr weitere Anfragen habt) in einer neuen Serie von CNC-Maschinen vereinigen: 1. Gefertigt aus leicht beziehbaren Materialien 2. Einsetzbar für unterschiedliche Antriebe 3. Erstellt mit einfachen Werkzeugen (so dass ihr die Maschinen selbst nachbauen könnt, daher die Bezeichnung "Selbst replizierend") 4. Die Maschinen sollen die Teile zur Anfertigung einer Kopie seiner selbst fräsen können (Selbst replizierend) Solltest du der Meinung sein, dass dieses Projekt Entwicklungshilfe verdient, um mich für die investierte Zeit zu entlohnen, dann benutze doch einfach die (oft ignorierte) "Spenden"-Schaltfläche auf meinen Seiten. 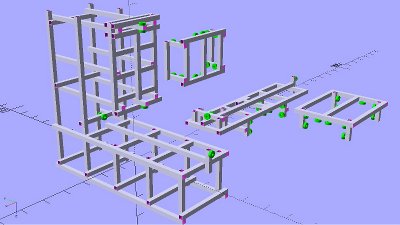
Erstmals habe ich eine CNC-Maschine mittels CAD Software konzipiert. Das Programm meiner Wahl ist OpenSCAD, da ich es bevorzuge, Quelltext einzugeben anstelle mit der Maus rumzuklicken. Die Mechanik basiert auf Vierkant-Stahlrohren der Abmessungen 20x20mm mit 2mm Wandstärke. Hier gibt's die in OpenSCAD erstellte Originaldatei. Das Video zum LinearantriebIn diesem Video untersuche ich die Genauigkeit meines Eigenbau-Linearantriebes mit Hilfe einer Messuhr. Linearantrieb mit Linearsensor aus einem alten DruckerDie Verwendbarkeit des Linearsensors aus der Druckkopfpositionierung von Tintenstrahldruckern wird in diesem Video untersucht. Linearantrieb mit optischer ComputermausDie Verwendbarkeit Optischer Computermäuse als Linearsensor wird in diesem Video untersucht. Messwerte Logitech G303 mit bis zu 12000DPI 1.) 12000DPI Physikalische Auflösung in der Einstellung 12000DPI: 12598DPI Abweichung wiederholtes Anfahren eines Punktes von rechts: 20μm (nach rechts) bei einer Fahrstrecke von 2x 300μm, 30μm (nach rechts) bei einer Fahrstrecke von 2x 600μm. Anfahren eines Punktes von rechts mit langsamer Rückbewegung: -130μm (nach links). Anfahren eines Punktes von rechts, Rückfahrt mit wechselnder Geschwindigkeit: 20μm (nach rechts) nach einem Durchlauf, 140μ (nach rechts) nach 15 Duchläufen. 2.) 3000DPI Physikalische Auflösung in der Einstellung 3000DPI: 3150DPI Anfahren eines Punktes von rechts mit langsamer Rückbewegung: -130μm nach links. Anfahren eines Punktes von rechts, Rückfahrt mit wechselnder Geschwindigkeit: 10μm (nach rechts) nach einem Durchlauf, 100μ (nach rechts) nach 15 Duchläufen. 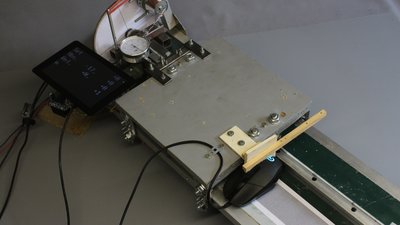
Die Versuche habe ich mit der Maus quer zur Bewegungsrichtung, so dass die Werte in X-Richtung erfasst werden wiederholt. 1.) 12000DPI Physikalische Auflösung in der Einstellung 12000DPI: 12268DPI Abweichung wiederholtes Anfahren eines Punktes von rechts: 10μm nach links bei einer Fahrstrecke von 2x 300μm, -10μm (nach links) bei einer Fahrstrecke von 2x 600μm. Anfahren eines Punktes von rechts mit langsamer Rückbewegung: -220μm (nach links). Anfahren eines Punktes von rechts, Rückfahrt mit wechselnder Geschwindigkeit: 20μm (nach rechts) nach einem Durchlauf, 180μ (nach rechts) nach 15 Duchläufen. Quellcode der Raspberry Pi Software zur Ansteuerung Optische Sensoren direkt abfragen Zu dem Video über Computermäuse als Linearsensoren habe ich einige Rückmeldungen erhalten. Interessant ist der Ansatz, die Bewegungsdaten über die Chips direkt auszulesen, den einige Sensoren bieten: Hdns2000 Hdns2100 Hdns2200 Om01 Om02 ADNS2051 ADNS2030 Uic1001 (Liste nicht vollständig, danke an Michele für die Nachforschungen) Die Forschungsarbeiten sind also keineswegs abgeschlossen... Qualitätsprüfung meiner FräsmotorenMessergebnisse
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|||||||||||||||
|
|