|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< CNC v2.0 CNC v3.x Serie >>> CNC V2.1Das Video zum KapitelVideos verschiedener NachbautenRudi aus Deutschland hat den Bau in seinem Video recht umfangreich dokumentiert. Er verwendet LinuxCNC:https://youtu.be/DFNpF2QBaxY Peter aus Österreich: https://youtu.be/0ErJPFKXAgk Nicolas aus Frankreich: https://youtu.be/r73QuL5oLHI Michael hat die CNC v2.1 nachgebaut und eine sehr ausführliche Anleitung im Netz veröffentlicht. Dort findet ihr auch weitere Tips und Tricks zum Nachbau. Hinterlasst einen Kommentar oder sendet mir eine Mail, wenn ihr ebenfalls Videos von euren Nachbauten hochgeladen habt - danke! Version 2.1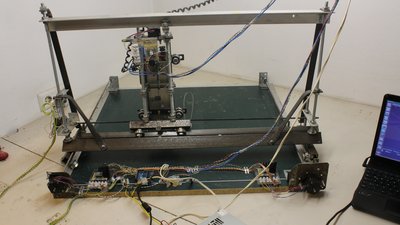
Aufgrund vieler Nachfragen habe ich meine CNC v2.0 auf bipolare Schrittmotoren umgerüstet. Teileliste zur UmrüstungDie Materialien zum Bau der Mechanik sind im Kapitel zu CNC v2.0 zu finden.
Änderungen an der Mechanik
Das Schmiersystem ist neu, aber nicht meine Erfindung: Ähnliche Anordnungen könnt ihr bei alten Dampfmaschinen sehen. Ein Messingröhrchen dient als Ölreservoir und durch eine 1mm Bohrung gelangt das Schmiermittel zur Gewindestange. Nehmt nicht allzu dünnflüssiges Öl und füllt nur einige Tropfen ein, da dieses sonst heraustropft. Zu diesem Problem hat mir Christian einen Kommentar hinterlassen, dass in den Röhrchen der alten Dampfmaschinen etwas Watte steckt, um das Heraustropfen zu verhindern. Danke für den Tip! 
Die Gewinde in den 10mm Bolzen habe ich ausgebohrt, dann habe ich ein Stück 6mm-Gewinde durchgesteckt und an beiden Enden je eine Mutter so weit eingedreht, dass sich die Gewindestange nur leicht klemmend drehen lässt. Die beiden Muttern habe ich an dieser Position mit reichlich Heißkleber mit dem Bolzen verklebt. Epoxidharz hält besser, mit dem Heisskleber sind aber leichter Korrekturen vorzunehmen, falls die Gewindestange zu sehr klemmt oder noch zu viel Spiel vorhanden ist. 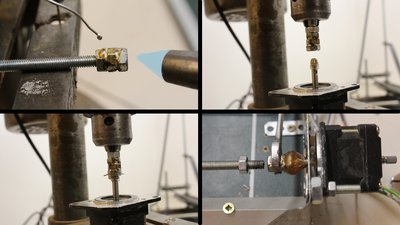
Die Verbindung von 5mm-Motorwelle und 6mm Gewindestange erfolgt durch 3 zusammengelötete M6er Muttern. Eine 1.5mm-Bohrung und die geschlitzte Motorwelle ermöglichen es, die geklebte Verbindung mit einem Stück 1mm-Draht zusätzlich zu sichern. Beim Ankleben an der Motorwelle wird der Verbinder mit einer Ständer-Bohrmaschine senkrecht ausgerichtet. Mit einer vierten Mutter wird der Verbinder mit der Gewindestange verschraubt und gesichert. Diese low-Tech Verbindung ist nicht perfekt zentriert. Sowohl Gewindestangen als auch Motoren wackeln etwas beim Drehen. Wer das besser hinbekommt oder mehr Geld in gute Verbinder investiert, wird mit einer höheren Präzision belohnt. Ich wollte aber erneut möglichst einfaches Werkzeug und leicht zu beziehende Materialien zum Bau der Mechanik verwenden. Wie zuvor ist die Motorbefestigung bewusst "weich" ausgelegt, um ein Klemmen der Gewindestange zu vermeiden. 
Zum Gravieren von Glas wird der Fräsmotor mit mehreren Streifen Lochblech an der Z-Achse befestigt. 
Den Fräsmotor habe ich wieder mit einer einfachen Schelle an einem Aluwinkel eingeklemmt, es existiert jetzt aber ein zusätzlicher Bestigungspunkt am unteren Ende. Optimal ist eine Befestigung, welche den Fräsmotor an dieser Stelle umschließt, wie es bei kommerziellen Fräsmotor-Halterungen der Fall ist. 
Ein Spritzschutz aus streifen Lochblech und einem Streifen Plastiktüte sorgt dafür, dass Staub und Wasser nicht über die ganze Maschine verteilt werden. Beispiele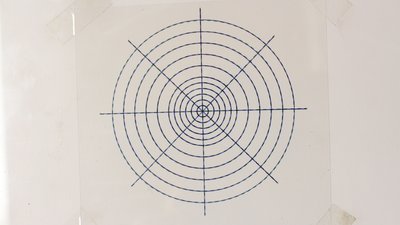
Testmuster, geplottet mit einem Kugelschreiber. 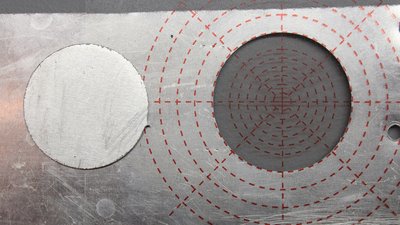
0.8mm Aluminiumblech. Dieses Material bringt die Biegefestigkeit der Maschine an ihre Grenzen. Die Maschine wurde nicht zum Bearbeiten von Metallen konzipiert! 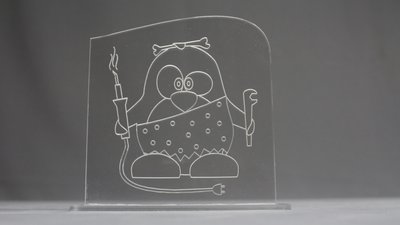
Acrylglas. 
4mm Pappelsperrholz. 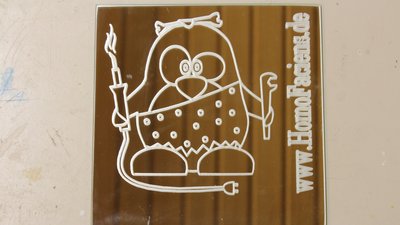
Gravieren von Glas. Elektronik
Für maximale Geschwindigkeit werden die Schrittmotoren nicht mit konstanter Spannung, sondern mit konstantem Strom betrieben. Ich verwende Platinen mit einem A4988 Chip, die preisgünstig zu bekommen sind und Ströme bis 2A an bis zu 35V schalten können. 
Zum Anschließen des Schrittmotors an die Platine muss bekannt sein, welche Leitungspaare zu je einer Phase gehören. Mit einem Multimeter in der Einstellung für Durchgangsprüfung kann das gemessen werden. Bei diesem Motortyp gehören die beiden Roten und die beiden Blauen Leitungen zu je einer Phase. 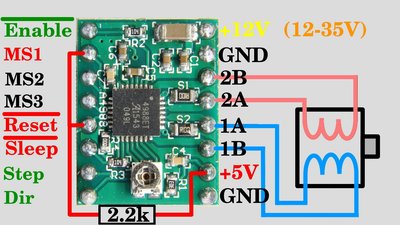
Phase 1 wird mit den Pins 1A und 1B, Phase 2 mit 2A und 2B verbunden. Welche Phase an welchem Klemmenpaar angeschlossen wird, ist egal. Masse wird mit Masse des Arduino und mit Minus der Spannungsquelle der Motoren verbunden. VDD ist die Spannung für die Logikpegel und muss mit +5V des Arduino verbunden werden. Die Spannung für den Motor sollte zwischen 12 und 35V liegen. Ich verwende die +12V-Leitung eines alten Computernetzteiles. Der "Nicht-Reset" Pin muss auf HIGH-Level sein, um den Chip zu aktivieren, was hier durch einen externen 2.2 Kiloohm Pullup-Widerstand erreicht wird (der Widerstandswert sollte zwischen 1k und 10k liegen). Ferner muss der "Nicht-Enable" Pin auf LOW-Level sein. Der Chip besitzt an diesem Pin einen internen Pulldown Widerstand, der das erledigt. Dennoch ist der Pin mit dem Mikrocontroller verbunden, um den Motor per Software Ein- und Ausschalten zu können. "Nicht Sleep" muss auf HIGH-Level sein, um den Chip zu aktivieren, was durch den internen Pullup-Widerstand automatisch erledigt wird. Die beiden Pins Direction und Step sind mit dem Microcontroller verbunden. Die Pins MS1 bis MS3 sind zum Einstellen des Mikrosteppings und besitzen alle einen internen Pulldown-Widerstand, womit der Motor standardmäßig in Vollschritten angesteuert wird. Ich habe MS1 auf HIGH-Pegel gelegt, womit der Motor in Halbschritten angesteuert wird. 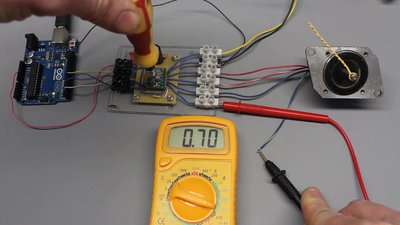
Der Phasenstrom wird über ein kleines Potentiometer eingestellt. Dazu muss ein Multimeter auf den Bereich für maximalen Strom eingestellt - bei diesem Modell sind das 10A und in Reihe zu einer Phase geschaltet werden. Ich verwende einen Phasenstrom von 0.7A, was ausreichend Drehmoment erzeugt. Außerdem ist dieser Strom weit von den Grenzwerten von Motor und Treiberplatine entfernt, was die Zuverlässigkeit erhöht. Der Schrittmotor sollte nicht (wie ich im Video gemacht habe) von der Treiberplatine getrennt oder angeschlossen werden, wenn die Stromversorgung eingeschaltet ist! 1.) Stromversorgung ausschalten. 2.) Amperemeter in Reihe zu einer Phase schalten. 3.) Stromversorgung einschalten und Strom auf gew&auuml;nschten Wert einstellen. 4.) Stromversorgung ausschalten und Schrittmotor wieder direkt an die Treiberplatine anschließen. 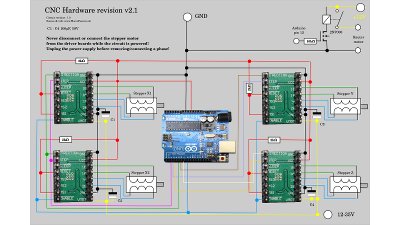
Der Schaltplan. Software
Die Software zur Ansteuerung der Maschine ist in C geschrieben und diese wird über die Kommandozeile bedient. Über das Menü kann die Datei mit dem Testmuster angewählt und es können verschiedene Parameter festgelegt werden. Das unterstützte Vektorformat ist "Scalable Vector Graphics (*.svg)". Dabei sind einige Besonderheiten zu beachten: Es können keine Flächen sondern lediglich Linien (Pfade) gezeichnet werden. Sämtliche Pfade müssen als "Polygon" vorliegen. Getestet habe ich die Software mit Grafiken, die ich mit Libre Office Draw bearbeitet und exportiert habe: 1.) Grafik mit LibreOffice Draw erstellen 2.) Strg + 'a' drücken, um alle Objekte zu markieren. 3.) Auf "Ändern -> Umwandeln in -> Polygon" klicken. 4.) Linien auf "Durchgehend" und Farbe Schwarz setzen. 5.) Flächen auf "Unsichtbar" setzen. 6.) Exportieren als *.svg 7.) Datei in das Unterverzeichnis "pictures" im Installationsverzeichnis der CNC-Software kopieren. Den Quellcode der Programme inklusive einiger Beispieldateien und des Schaltplans gibt's in der Rubrik Download. GRBLMit der GRBL-Software kann G-Code von der CNC verarbeitet werden. Ich beantworte lediglich Fragen zu Problemen die im Zusammenhang mit dieser kurzen Installationsanweisung stehen. Wer mehr wissen möchte, sollte sich die Dokumentation zu GRBL durchlesen!.Laden von GRBL auf den Arduino Uno unter Ubuntu 14.04LTS: Installieren der Arduino IDE (Version 1.1 oder neuer!): 1.)Terminalfenster mit Alt + 'T' öffnen und folgende Kommandos eingeben: sudo apt-get update sudo apt-get install arduino 2.)Download der GRBL Software und entpacken mit: wget -N https://github.com/grbl/grbl/archive/master.zip unzip master.zip 3.)Arduino IDE starten und Libraries importieren: Auf "Sketch -> Import Library -> Add Library" clicken. In dem folgenden Dialog den Unterordner "grbl" im Ordner "grbl-master" auswählen und "OK" klicken. Nach erfolgreichem Import ist die Software unter "Datei -> Beispiele -> grbl -> grblUpload" zu finden. Nach dem Öffnen dieser Datei auf die Schaltfläche zum Upload klicken und warten bis der Vorgang abgeschlossen ist. Der Arduino muss natürlich an die USB-Schnittstelle angeschlossen sein. 4.) Maschinenparameter setzen: Für meine Schrittmotoren ergeben sich 200 Schritte für eine Bewegung um 1mm und als Maximalgeschwindigkeit habe ich 120mm/Minute festgelegt. Dazu das Terminalfenster der Arduino IDE öffnen, die Übertragungsrate auf 115200baud und Zeilenende auf "Carriage return" setzen. Folgende Befehle senden: $100=200 $101=200 $102=200 $110=120 $111=120 $112=120 $130=500 $131=500 $132=50 Mit dem Befehl: $$ können die gesetzten Parameter angezeigt und kontrolliert werden. Terminalfenster und Arduino IDE schließen. 5.)"Universal G-Code sender" installieren (inclusive JAVA 8 JDK!): sudo add-apt-repository ppa:webupd8team/java sudo apt-get update sudo apt-get install oracle-java8-installer sudo apt-get install maven wget -N https://github.com/winder/Universal-G-Code-Sender/archive/master.zip unzip master.zip 6.)"Universal G-Code sender" starten: cd Universal-G-Code-Sender-master mvn exec:java -Dexec.mainClass="com.willwinder.universalgcodesender.MainWindow" Im Unterverzeichnis "pictures" meiner Software findet ihr die Beispieldatei "gnome-G-code.nc" die ich im Video gezeigt habe. Wie ihr mit CAD oder sonstigen Programmen G-Code erzeugt, ist eure Sache. Ich verwende (zumindest bislang) keine CAD-Software! Häufig gestellte Fragen (FAQ)
<<< CNC v2.0 CNC v3.x Serie >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
||||||||||||||||||||||||||||||||||||
|
|