|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< Lander 2 R4-Automuseum >>> R3 - KonstruktionBedienungsanleitung RoverSteuere Curiosity Pi Der Film zum KapitelUpdates: Teileliste
Komponenten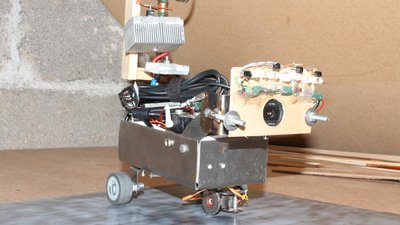
Der Zentralcomputer von R3 ist ein Raspberry Pi, ein extrem kostengünstiger Kleinstrechner. Die Abmessungen der Rovers betragen in etwa: 20 x 12 x 22cm (LxBxH) inklusive Strommast. Das Gehäuse sollte etwas größer ausfallen. Ich hatte beim Bau nicht bedacht, dass der USB-Hub ebenfalls untergebracht werden muss. Als Webcam dient eine Logitech C525 mit einer maximalen Auflösung von 1280x720 Pixel. Die automatische Fokussierung dieser Kamera funktioniert selbst für sehr nahe Objekte recht gut. Die Kamera kann um ihre horizontale Achse durch ein Servo gedreht werden, um Objekte am Boden und der Decke untersuchen zu können. 5 LEDs dienen zur Beleuchtung bei Nachtfahrten. 
Das Fahrzeug is dreirädrig gebaut. Dabei sind die beiden hinteren Räder starr und das vordere Rad wird durch ein gehacktes Servo angetrieben und durch ein weiteres Servo gelenkt. Dass das Rad aus einer Metallscheibe besteht und ein Schleifkontakt an diesem angebracht ist, hat einen Grund: Fährt der Rover auf eine Metallplatte, kann der Raspberry Pi über einen GPIO-Pin mit anderen Computern kommunizieren. In meinem RoboSpatium könnt ihr somit z.B. das Space Shuttle ansteuern, das mit einem Atmega8 Microcontroller verbunden ist. Elektronik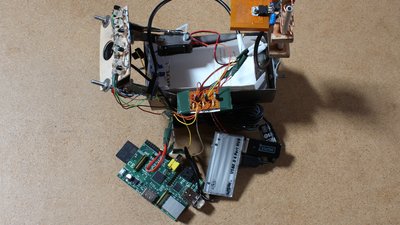
Die Elektronik ist wesentlich einfacher aufgebaut als bei meinen ersten beiden Rovern. Die GPIOs des Raspberry Pi machen es einem recht leicht, die Peripherie anzusteuern. 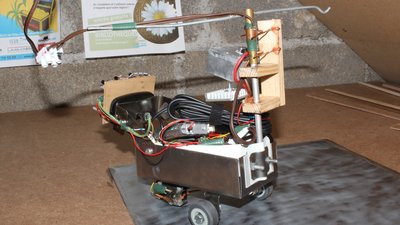
Die Zuleitung vom Netzteil zum Rover ist lang und dünn. Um den Spannungsabfall über die Zuleitung kompensieren zu können, liegt an dieser 12V an. Erst am Strommast des Rovers wird diese auf 5V heruntergeregelt. Da der WLAN-Stick recht empfindlich auf Spannungsschwankungen reagiert und die Spannungsregler in meiner Schublade nur für maximal 2A ausgelegt sind, habe ich 2 Regler verbaut. Regler 1 versorgt den Raspberry Pi und den USB-Hub mit Spannung (Großer Kühlkörper) und Regler Nummer 2 die Servos und LEDs. 
SteuersoftwareIn der Rubrik Download findet ihr eine stark vereinfachte Version der verwendeten Software.Noch Fragen zu R3?Im englischsprachigen Raspberry Forum gibt's einen Post zum Thema.Meine Mailadresse findet ihr im Impressum <<< Lander 2 R4-Automuseum >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|