|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< R14 pi-top[4] R18 ESP32-CAM >>> R15 Hoverboard - KonstruktionDas Video zu R15Mechanik
R15 ist aus einem sogenannten Hover- oder Balanceboard entstanden. Mich hat dabei interessiert, welche Komponenten man mit dem Kauf eines günstigen Gerätes erwirbt. Vor allem die drehmomentstarken Motoren haben mein Interesse entflammt. Neben dem Board habe ich noch weitere Teile benötigt, um den Rover in Betrieb nehmen und per Browserinterface steuern zu können: Teileliste:

Das Chassis besteht aus Vierkantrohren mit einer Bodenplatte aus Blech. 
Für den Kettenantrieb habe ich meinen 3D-Drucker angeworfen. Die Kettenglieder bestehen aus PETG und die Hinterräder besitzen Reifen aus Flex-Hard genanntem Material auf Felgen aus PLA. Alle übrigen Teile wie zum Beispiel die Kamerahalterung sind ebenfalls aus PLA entstanden. 
Komplett montiert sieht der Rover immer noch sehr nach Prototyp aus. Demontage Hoverboard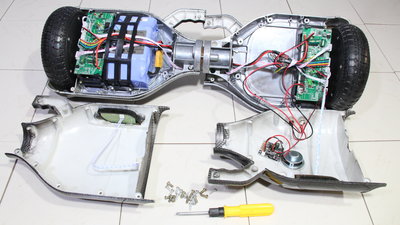
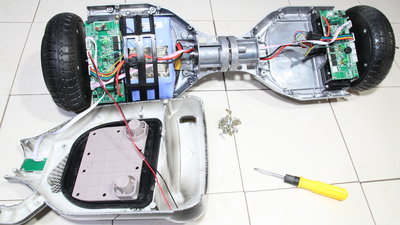
Der erste Schritt zum Bau von R15 bestand im Zerlegen des Gerätes, wozu lediglich ein Kreuzschlitz-Schraubendreher und ein 6mm Sechskant ausreichen. 




Elektronik
Die Motorsteuerung mit einem Arduino UNO übernehme ich an den Treiber ICs für die MOSFET Halbbrücken. Die Pinbelegung der Chips ohne Aufdruck habe ich wie im Video gezeigt, erkundet. 
Um zu verhindern, dass sich die Signale des Mikrocontrollers auf der Platine mit denen des Arduino Uno überlagern, müssen die beiden Steuerleitungen von der Platine getrennt werden. Mit Lötkolben und der spitzen Klinge eines Cuttermessers habe ich die Pins vorsichtig nach oben gebogen. 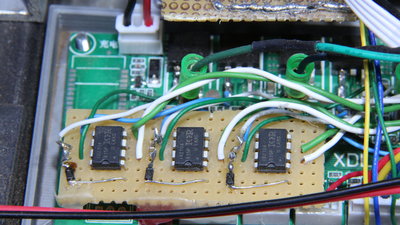
Wesentlich einfacher geht es, wenn man sich die Treiber ICs in der Version für Durchsteckmontage bestellt und alles auf einer separaten Platine verlötet. Die anzuschließenden Punkte auf dem Board, wie die Pins der Leistungstransistoren oder die Motoranschlüsse sind mit dem Lötkolben sehr einfach zu erreichen. Die Diode und den Kondensator könnte man ebenfalls durch größere Komponenten für Durchsteckmontage ersetzen, ich habe mich aber damit abgemüht, die originalen SMD Bauteile zu verlöten. 
Der erste Testlauf erfolgte noch ohne Auslesen der Hallsensoren. Diese liefern 3.3V an den Ausgängen, was vom Arduino UNO als HIGH-Signal erkannt wird. SoftwareDie Software, vor allem der Motorsteuerung befindet sich in einem sehr frühen Stadium der Entwicklung. Eine Grundidee hinter R15 ist es, die Motorsteuerung bürstenloser Antriebe in meinen Kapiteln zu Physical Computing genauer zu erklären. Das wird Schritt für Schritt in den nächsten Wochen/Monaten/Jahren erfolgen. Habt Geduld, ich denke es wird sich lohnen!DownloadDie 3D-Dateien der gedruckten Teile der Mechanik und die sehr frühe Version der von mir verwendeten Software sind im Download-Paket enthalten.TestfahrtenWelche Roboter zur Zeit gesteuert werden können, seht ihr auf der Übersichtsseite meines RoboSpatiums.<<< R14 pi-top[4] R18 ESP32-CAM >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|