|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt WinchBot 2.0Das Video zum KapitelRS Components Video "for the inspired"Pyramidenbau im Schnelldurchgang
WinchBot 2.0 ist die Version meines per Seilwinden angetriebenen Roboters, der auf der SPS/IPC Drives in Nürnberg 2017 auf dem Messestand meines Sponsors RS Components ausgestellt wurde. TeilelisteEntstanden ist WinchBot 2.0 - wie auch seine Vorläufer - aus einer Kooperation mit RS-Components, daher sind in der Tabelle die Links zu deren Online-Shop gelistet.
Mechanik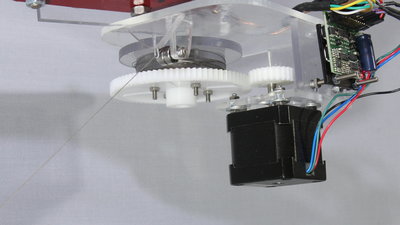
Die Mechanik ist identisch zu der von WinchBot 1.5, lediglich mit der Übersetzung der Seilwinden habe ich ein wenig experimentiert: Die Zahnräder an den Schrittmotoren besitzen nun 24 Zähne, um die Geschwindigkeit etwas erhöhen zu können. Für noch höhere Geschwindigkeiten müssen drehmomentstärkere Schrittmotoren verwendet werden - der Versuch mit 36 Zähnen an der Motorwelle hat ergeben, dass dann Schritte ausgelassen werden. Die Gecko Schrittmotortreiber vertragen bis zu 3.5A Phasenstrom, die Motoren allerdings nur bis zu 1.68A. Elektronik
5 Schrittmotoren inklusive Treiberplatinen, 3 Servos und eine SIMATIC IOT2020 werden zum Betrieb von WinchBot 2.0 benötigt. Die drei Schrittmotoren an den Winden ziehen einen Phasenstrom von 1.68A an 2.8V und werden über Geckodrive G250X mit 10 Mikroschritten angesteuert. Die beiden unteren Schrittmotoren sind mit 400mA an 12V etwas leistungsschwächer, dafür aber auch leichter. Diese werden über L298D Chips im Vollschrittmodus angesteuert. Die drei Servos dienen zum Öffnen und Schließen des Greifers und können diesen um zwei Achsen drehen. 
Als Netzteil kommt eine SITOP PSU 100S mit einer Ausgangsspannung von 12V bei bis zu 14A zum Einsatz, über welche die SIMATIC und die Schrittmotoren mit elektrischer Energie versorgt werden. Die Gleichspannung für die Servos liefert ein zweites Netzteil mit 5V 3A. 
Auf der Messe wurden zwei induktive Sensoren verwendet, um den WinchBot hin und wieder kalibrieren zu können. Da alle 20 GPIOs durch den WinchBot belegt waren, habe ich eine Brainbox verwendet, um den Zustand der Sensoren über das Netzwerk abzufragen. Die Brainbox Typ ED008 besitzt 8 digitale Ein/Ausgänge, die geschaltet oder abgefragt werden können, indem ASCII-Zeichenfolgen über das Netzwerk gesendet werden. Somit werden nur kurze Leitungen hin zu den Sensoren benötigt und deren Zustand kann über beliebige Distanzen per LAN-Kabel abgefragt werden. 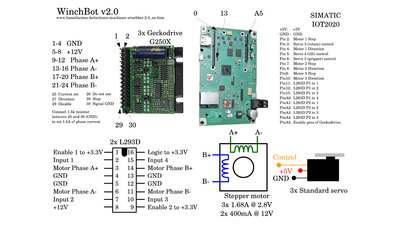
Software
Angesteuert wird WinchBot 2.0 durch das schon bei den Vorgängern gezeigte, jedoch weiter ausgebaute Browser-Interface. Als Webserver läuft "Monkey" auf der SIMATIC - der WinchBot kann somit über eine Weboberfläche von jedem Endgerät mit einem Browser angesteuert werden. Die Software inklusive Schaltplänen gibt's als Download. Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|