|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< CNC-Maschinen Justierbare Gelenke >>> Demo-Pult ServomotorenDas Video zum Siemen ServoantriebVersuchsaufbau
Von Siemens habe ich einen industriellen Servoantrieb erhalten. Mit diesem habe ich ein Pult aufgebaut, mit dessen Hilfe die Funktionsweise dieser closed loop Antriebe erforscht werden kann. Bei dem Motor Typ SIMOTICS S-1FL6 handelt es sich um einen elektronisch kommutierten Motor, der mit 3-Phasen 230V Wechselspannung betrieben wird. Die elektrische Leistung beträgt bis zu 0.75kW, also etwa 1 Pferdestärke laut James Watt. Der integrierte Drehsensor ist wesentlich feiner gerastet als bei meinen Eigenbau-Antrieben: Die beiden Ausgänge liefern 10.000 Pulse pro Umdrehung. Die verwendete Steuereinheit ist eine SINAMICS V90PTI (B10-8UA0) mit Pulse-Train-Interface von Siemens. Die Position des Motors wird über zwei Eingänge - einer für die Schritte und einer für die Drehrichtung - vorgegeben. Zusätzliche Eingänge an der Steuereinheit erlauben unter Anderem das Ein- und Ausschalten des Antriebs oder das Abfragen von Endschaltern. Über z.B. eine IOT2020 kann der Motor positioniert werden, die Spannungen der Ausgänge müssen lediglich über Transistoren auf die in der Industrie üblichen 24V angehoben werden. Die SINAMICS Kontrolleinheit kann an dem von mir verwendeten 24V-Eingang Step-Pulse mit einer Frequenz von bis zu 200kHz empfangen. Über einen zweiten High-Speed Eingang mit 5V Differenzspannung sind bis zu 1MHz möglich. 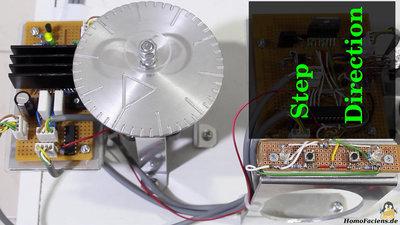
Die Steuerelektronik des bipolaren Schrittmotors ohne Sensorrückkopplung basiert auf einem LV8772 Chip, der bis zu 2.5A Phasenstrom liefern kann - über ein Potentiometer habe ich diesen auf lediglich 420mA eingestellt, was für die Demonstration ausreicht. Die Drehung des Motors wird über zwei Eingänge gesteuert (Step + Diection). Über zwei Tastschalter können die beiden Eingänge manuell angesteuert werden. 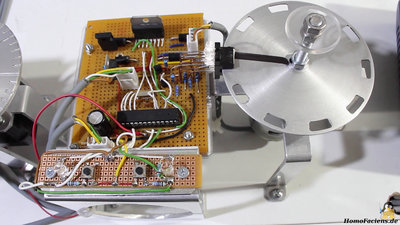
An der Motorwelle des Gleichstrommotors ist eine Sensorscheibe befestigt, um die Drehung per Software erfassen zu können. Der Rand der Scheibe ist mit 10 Löchern versehen, wodurch die Drehung über zwei Lichtschranken abgetastet werden kann. Werden die Lichtschranken durch die Sensorscheibe blockiert, so wird eine Spannung von 0V ausgegeben - die beiden LEDs sind ausgeschaltet. Treffen beide Sensoren auf eine Lücke in der Sensorscheibe, so fällt Licht auf die Photosensoren und es wird eine Spannung von 5V ausgegeben - die beiden LEDs leuchten. Die Ausgänge dieses Drehsensors können je nach Stellung der Scheibe vier unterschiedliche Zustände einnehmen. Dreht sich die Scheibe so weit, dass sich der Zustand an einer der beiden Lichtschranken ändert, so kann errechnet werden, in welcher Richtung die Drehung erfolgt ist. Der Drehwinkel wird über die Anzahl der Lücken in der Sensorscheibe bestimmt. Dreht sich die Scheibe um eine Lücke, so ändert sich der Zustand der beiden Ausgänge vier mal. Da sich 10 Lücken am Rand der Scheibe befinden, ändern sich die Zustände an den Ausgängen für eine volle Umdrehung 40 mal. Ein Schritt entspricht somit 9 Grad. Die Signale des Drehsensors werden von einem Mikrocontroller Typ ATmega328P eingelesen und mit externen Positionssignalen verrechnet, um die Steuersignale für die H-Brücke zu erzeugen. Weitere Infos zum Thema auf meinen SeitenWie bipolare Schrittmotoren funktionieren, zeige ich im Kapitel:Schrittmotoren Wie kommutierte Gleichstrommotoren funktionieren, zeige ich im Kapitel: Permanenterregter Gleichstrommotor Mehr zum Thema Rotationssensoren gibt's unter: Drehgeber Gabellichtschranken <<< CNC-Maschinen Justierbare Gelenke >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|