|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< Demonstration Servomotor Stationärmotoren >>> Justierbare GelenkeDas Video zu GelenkenAufbau und Funktionsweise
In diesem Kapitel möchte ich euch ein paar recht einfach herzustellende, dabei aber extrem spielarme und robuste Gelenke vorstellen. Allen Konstruktionen gemeinsam ist die Tatsache, dass die Gelenke justierbar ausgelegt sind, womit geringe Ungenauigkeiten in der Fertigung ausgeglichen werden können. Kernelemente sind Schrauben mit Rundköpfen und Flacheisen mit angesenkten Bohrungen - beide Konstruktionselemente sind an jeweils einem Alu-Vierkantrohr befestigt. 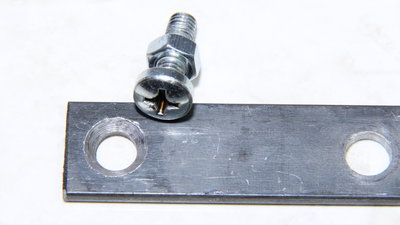
Die Bohrungen in den Flacheisen sind kleiner als der Durchmesser der Schraubenköpfe - bei den hier verwendeten M6er Schrauben habe ich 8mm-Bohrer verwendet. Angesenkt habe ich diese Bohrungen anschließend mit einem 12mm Bohrer, was dem Durchmesser der Schraubenköpfe entspricht. Die Kontaktfläche zwischen Schraubenkopf und Gelenkpfanne ist durch die zentrale Bohrung genauer definiert, was das Spiel des Gelenkes reduziert. 
Zwei M6er Schrauben werden nun mit insgesamt 4 Muttern an das eine Alu-Vierkantrohr geschraubt. 
Eines der beiden Flacheisen wird mit zwei Gewindestücken an dem zweiten Vierkantrohr befestigt. 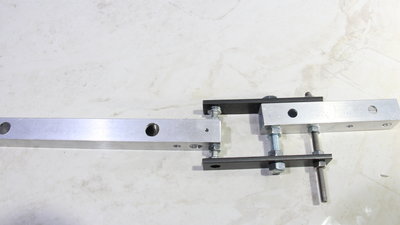
Das zweite Flacheisen wird nun ebenfalls verschraubt und dabei mit den Muttern so an die Schraubenköpfe gepresst, dass die gewünschte Steifigkeit des Gelenkes erreicht wird. Hier ist das Gelenk so justiert, dass die beiden Alu-Vierkantrohre nicht auf einer Linie liegen - auch diesbezüglich bietet die Konstruktion gestalterischen Spielraum. 
Die Kontaktfläche der runden Schraubenköpfe mit den angesenkten Bohrungen ist sehr klein, das System läuft sich bei den ersten Bewegungen noch etwas ein, womit das Gelenk eventuell nachjustiert werden muss. Ein Tropfen altes Motoröl sorgt dafür, dass sich das Gelenk schön geschmeidig bewegt - der zweite Vorteil der zentralen Bohrung ist, dass das Schmiermittel leicht aufgetragen werden kann. Diese sehr simple Konstruktion ist wirklich extrem spielarm und der Verschleiß vernachlässigbar, wenn man hin und wieder mit einem Tropfen Öl nachschmiert. 
Ein weiterer Pluspunkt ist, dass man dieses Gelenkprinzip auf die unterschiedlichsten Anwendungsszenarien anpassen kann: Werden wie hier 4mm Schrauben verwendet, so schrumpfen die Abmessungen, was für kleine Maschinen von Vorteil ist. 
Sollen bei großen Projekten hohe Kräfte aufgefangen werden, so können größere Schrauben zum Einsatz kommen - hier verwende ich ein Stück M10er Gewinde. Als Gelenkköpfe wirken Hutmuttern - mit ihren halbkugelförmigen, glatten Oberflächen sind diese besonders gut dafür geeignet. Neben den Abmessungen eignet sich der Gelenktyp auch zum Experimentieren mit unterschiedlichen Materialien: Eisen auf Eisen ist ohne Schmierung eine sehr ungünstige Materialkombination. Eisen auf Aluminium hingegen läuft auch ohne Öl schon bedeutend geschmeidiger. 
Neben der Schraubengröße ist der Abstand der Flacheisen zueinander ein Parameter für Experimente: Wird der Abstand vergrößert, so sinken aufgrund der Hebelgesetze die auf die Gelenkpfannen und Schraubenköpfe wirkenden Kräfte bei Belastung senkrecht zur Gelenkachse. 
Hier ist eine weitere Variation des Gelenktyps zu sehen: Die Schrauben sind fest mit den Flacheisen verbunden und die Schraubenköpfe drehen sich in Bohrungen des Alu-Vierkantrohres. 
Wird ein Kreuzgelenk benötigt, das sich um 2 Achsen drehen kann, so ist auch das kein Problem: Das Zentralstück besteht aus vier Schrauben, befestigt an einem kleinen Stück Vierkantrohr.Beide Achsen sind justierbar, das Kreuzgelenk ist stabil und äußerst spielarm. 
Für weitere Experimente habe ich meinen 3D-Drucker angeworfen: Die Materialkombination ist nun Stahl und Kunststoff, genauer gesagt PLA - das funktioniert auch ohne Schmierung schon sehr gut. Zentralstück ist ein Würfel mit 4 "Dellen", also Gelenkpfannen. Auch hier gehen "Bohrungen" durch den Würfel, um die Kontaktfläche zwischen Schraubenkopf und Würfel kleiner und somit genauer definiert zu halten, was das Spiel des Gelenkes reduziert. 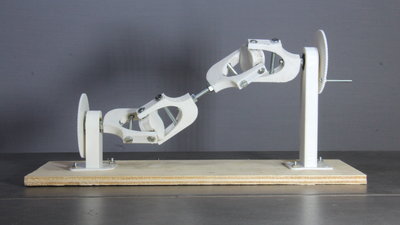
Zwei Kreuzgelenke ergeben eine Kardanwelle und können den Achsversatz bei Antrieben ausgleichen. 
Soll ein höheres Drehmoment übertragen werden, müssen nicht zwangsläufig Schrauben mit größeren Köpfen verwendet werden: Es genügt, die Abmessungen der Gelenkgabeln und des Zentralstücks zu vergrößern - den Hebelgesetzen sei Dank. DownloadDie in dem Video gezeigten Gelenke aus dem 3D-Drucker sind als Download-Paket erhältlich.<<< Demonstration Servomotor Stationärmotoren >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|