|
|
|
|
News The Project Technology RoboSpatium Contribute Subject index Download Responses Games Gadgets Contact WinchBot 1.5The video about WinchBot 1.5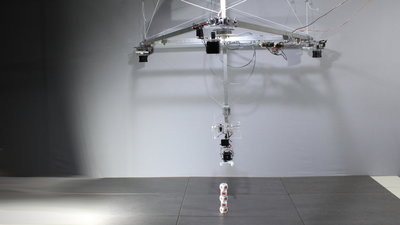
RS-components was looking for an interesting project to display on the SPS IPC Drives in Nürnberg, Germany. So the idea was born to create an improved version of this special robot with it's gripper is moving along the coordinates by three winches. Core element of the new model are bipolar stepper motors, replacing the geared DC motors with encoder feedback of the previous WinchBot. The advantage is a clearly lower step width of those motors. Parts listMy WinchBot originates from a cooperation with RS-Components which is why links in the table point to their online shop.
Mechanics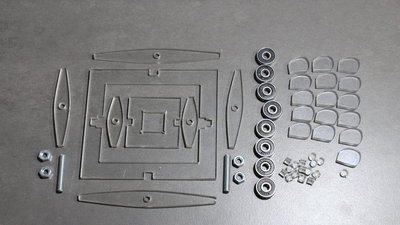
I have cut the 5mm plastic sheets with my CNC v3.2. 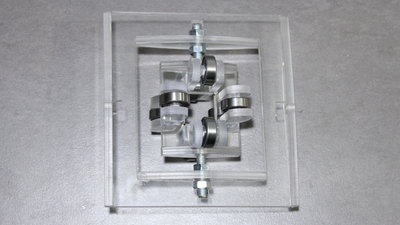
The central linear guide is smaller that that of my first WinchBot. 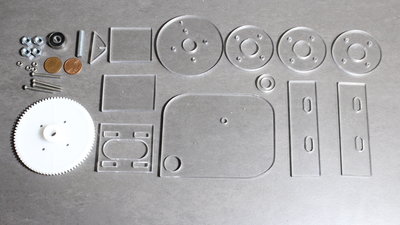
The parts for the cable winches have been modified for the bipolar stepper motors. 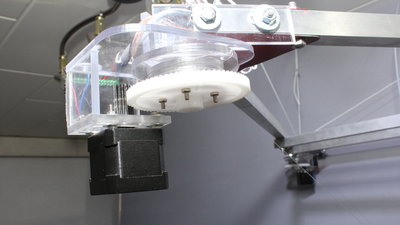
I am using gearwheels from RS-components for the transmission at the winches. 
Same as before, I had built the lower part with the gripper using 5 servos, however after a first test run I replaced two of them with... 
...smaller bipolar stepper motors to reduce oscillations caused by the servos. 
I had to redesign the frame of the gripper part after another test to make the construction more sturdy. 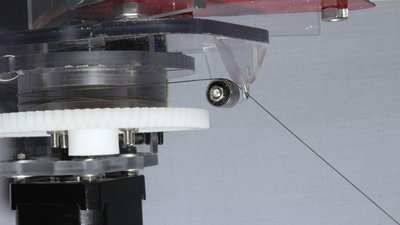
Caused by the higher weight of the gripper part, the steel cables running through tiny wire loops were fraying. To reduce strain on the cables I have added tiny ball bearings. 
The triangular frame hanging on the ceiling is stabilized by cords running crosswise. That reduces oscillations of the frame - without the cords, the WinchBot would become a large pendulum because of the high mass of the gripper part with the stepper motors. Electronics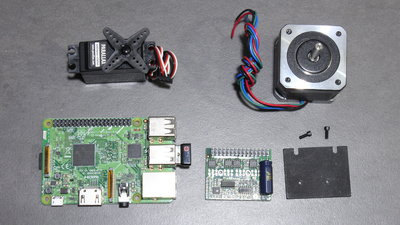
5 stepper motors with driver chips, 3 servos and a Raspberry Pi model 3 are needed to drive WinchBot 1.5. The stepper motors at the winches draw a current of 1.68A at 2.8V and they are driven by Geckodrive G250X in 10 microsteps per full step. The stepper motors at the gripper platform draw a current of 400mA at 12V, so they are weaker but not as heavy as the winch motors. They are drivem through L293D chips in full steps. The servos are used to rotate and open or close the gripper. 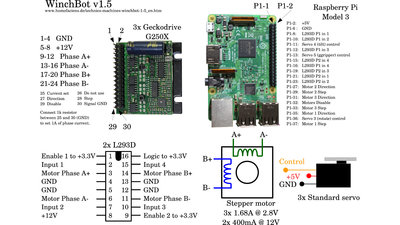
Software
Same as before I am using a browser interface to control WinchBot 1.5, however there are many improvements. With that interface, you can program sequences from all operating systems on many devices. Here I am using a Nokia 3 and even with this entry level smartphone you can control the Winchbot easily. The web server "Apache" with Perl support is running on the Raspberry Pi. By connecting a bluetooth keyboard and installing a simple text editor as well as an secure shell client on the smartphone, you can edit and compile all source codes used for my WinchBot. You don't need gigabytes of software or expensive hardware to do robotics - as you can see it all works even with this tiny pocket computer - as long as you are smarter than your phone... You can get the software including scematics at the column download. News The Project Technology RoboSpatium Contribute Subject index Archives Download Responses Games Links Gadgets Contact Imprint |
|
|