|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< Kippstufen Konstante Spannung >>> PulsweitenmodulationDas Video zum KapitelLeistungskontrolle
Wenn ihr beabsichtigt, den Elektromotor eines Fahrzeugs anzusteuern, besteht die einfachste Möglichkeit darin, einen Schalter in Kombination mit einer Batterie zu verwenden: Wird der Schalter geschlossen, so dreht sich der Motor mit seiner maximalen Leistung und sobald der Schalter geöffnet wird, hält das Fahrzeug an. Solltet ihr jemals ein Auto gesteuert haben, so dürfte euch aufgefallen sein, dass die meiste Zeit über nur ein Bruchteil der Motorleistung benötigt wird, um das Fahrzeug zu bewegen. Gehen wir von den Voraussetzungen aus, dass das Fahrzeug eine Strecke von 100m zurücklegen soll, dass dieses dabei in Nullkommanix auf seine Endgeschwindigkeit beschleunigt und dass nach Schließen des Schalters 5 Sekunden vergehen, bis dieses die Ziellinie passiert. Das ist gleichbedeutend mit einer Durchschnittsgeschwindigkeit von 20m/s oder 72km/h. Was macht ihr, wenn auf der Strecke eine Höchstgeschwindigkeit von 50km/h erlaubt ist? Nun muss das Auto die Strecke in 7.2 Sekunden durchfahren, um das Geschwindigkeitslimit einzuhalten. Um das zu erreichen, könnt ihr den Motor für 2.5 Sekunden einschalten, diesen 2.2 Sekunden ausgeschaltet lassen und für weitere 2.5 Sekunden wieder einschalten. Jetzt überquert das Auto die Ziellinie nach exakt 7.2 Sekunden, jedoch ist diese Fahrweise sehr unkomfortabel und sollte sich auf der Strecke eine Radarfalle befinden, werdet ihr dennoch ein paar Euro abgeben müssen. Die Lösung des Problems besteht darin, den Motor mehrfach ein- und wieder auszuschalten. Wird der Schalter nur 0.5 Sekunden geschlossen und dabei immer 0.44 Sekunden lang offen gelassen, so wirkt die Bewegung schon viel sanfter. Unter der Verwendung von Intervallen von 0.025 beziehungsweise 0.022 Sekunden, sieht euer Auge (und ebenfalls die Radarfalle) ein Fahrzeug, dass sich mit einer Geschwindigkeit von 34km/h bewegt und nicht ein Objekt, das sich alle 0.047 Sekunden für 0.025 Sekunden mit Maximalgeschwindigkeit bewegt. Unter Berücksichtigung der Massenträgheit des Automobils wird die Bewegung des Fahrzeugs nahezu vollkommen gleichmäßig. Nicht einmal die Fahrzeuginsassen werden die einzelnen Schaltpulse der Motorsteuerung bemerken. Die Durchschnittsgeschwindigkeit des Automobils wird durch eine hohe Schaltgeschwindigkeit kontrolliert. Je länger die Ein- im Vergleich zur Ausschaltzeit, um so mehr Leistung wird an den Motor geleitet, wodurch die Durchschnittsgeschwindigkeit steigt. Dieses Prinzip nennt man Pulsweitenmodulation (PWM), Pulslängenmodulation (PLM), Pulsdauermodulation (PDM) Pulsbreitenmodulation (PBM), im Englischen Pulse-width modulation. Die Einschaltzeit im Verhältnis zur Periodendauer bezeichnet man als den Tastgrad oder auch Aussteuergrad, im Englischen als duty cycle und dieser wird üblicherweise in Prozent angegeben. Ein Tastgrad von 100% bedeutet, dass der Motor ständig eingeschaltet ist, während ein geringerer Wert einer kleineren Leistung, beziehungsweise in unserem Beispiel einer geringeren Geschwindigkeit entspricht. ElektronikIm Kapitel zu Kippgliedern haben wir bereits gelernt, wie eine PWM mit einem Tastgrad von 50% erstellt werden kann. Wird dieser Schaltkreis leicht abgeändert, so kann der Tastgrad des Ausgangssignals stufenlos verstellt werden:
Der Widerstand R3 wurde durch ein Potentiometer ersetzt und zwei Dioden wurden eingefügt. Jetzt fließt der Ladestrom durch D1, während der Entladestrom durch D2 geleitet wird. Abhängig von der Stellung des Potentiometers P1 unterscheidet sich der Widerstand des Ladestromes - der durch den oberen Zweig der Schaltung fließt - von dem des Entladestromes - der durch den unteren Zweig fließt. Die Schaltfrequenz ist der Kehrwert der Periodendauer ([9.4]): Dabei bedeutet: ln(2) = 0.693147181 f - Frequenz R - Widerstand C - Kapazität 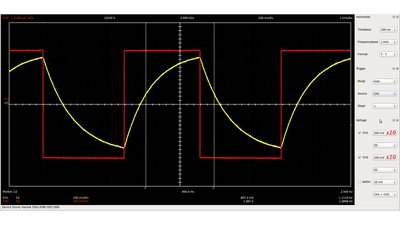
Oszillogramm eines Pulsweitensignals mit einer Tastrate von 50%, das identisch zu dem Signal des astabilen Multivibrators des vorangegangenen Kapitels ist. Rot - Ausgangssignal Gelb - Spannungsverlauf am Kondensator beziehungsweise am invertierenden Eingang des Operationsverstärkers. Unter Verwendung eines Kondensators mit 0.33μF und eines 1MΩ Widerstands fällt die Schaltfrequenz deutlich kleiner aus als erwartet. Die gemessene Periodenzeit beträgt 0.92s, während der errechnete Wert 0.23s entspricht. Eine Erklärung dafür ist der Spannungsabfall an der in Durchlassrichtung geschalteten Diode (etwa 0.6V), was einen geringeren Lade- beziehungsweise Entladestrom ergibt. 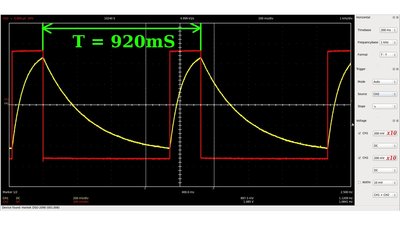
Tastrate 20% 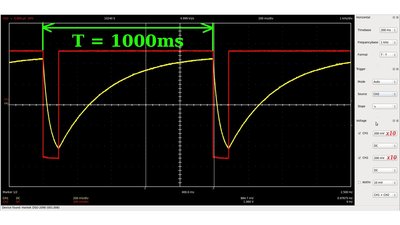
Tastrate 90% Wird die Tastrate verändert, so kommt es zwangsläufig auch zu einer leichten Variation der Schaltfrequenz, da beide koppelnden Widerstands- / Kondensator- Netzwerke am invertierenden beziehungsweise nichtinvertierenden Eingang mit dem Ausgang des Operationsverstärkers verbunden sind. Die Schaltfrequenz muss so hoch gewählt werden, dass die Last im Mittel gleichmäßig angesteuert wird. Für eine Motorsteuerung werden üblicherweise Schaltfrequenzen von einigen bis hin zu mehreren Zehntausend Kilohertz verwendet. Erinnert euch, dass es zu Schaltverlusten im Leistungstransistor kommt, wann immer der Schaltzustand verändert wird (siehe Kapitel Schalter), womit sich eine obere Grenze für die Schaltfrequenz ergibt. 
Beispielschaltung mit einer Schaltfrequenz von etwa 330Hz: R1 = 47kΩ R2 = 12kΩ R4 = R5 = 2kΩ P1 = 1MΩ C1 = 1nF Op-amp e.g. LM324N T1 e.g. IRLZ24N für 5 - 24V, 10A Betrieb. 
R1 = R3 = R4 = 56kΩ R5 = R9 = R10 = 220kΩ R6 = R7 = 100kΩ R8 = 12kΩ R11 = 1MΩ R12 = 33kΩ P1 = 10kΩ P2 = P3 = P4 = 100kΩ C1 = 0.33μF IC = MC34074P 4-fach Operationsverstärker Dieser etwas komplexere Schaltkreis besteht aus drei Operationsverstärkern. Der linke Operationsverstärker wirkt als nichtinvertierender Schmitt-Trigger, der mittlere als Integrator. Das Ausgangssignal des mittleren Operationsverstärkers ist gleichzeitig das Eingangssignal des linken Schmitt-Triggers, während der Ausgang des Schmitt-Triggers wiederum über einen Widerstand und ein Potentiometer mit dem invertierenden Eingang des Integrators verbunden ist, was eine dreieckförmige Ausgangsspannung erzeugt. Dieses Signal liegt am Eingang des nichtinvertierenden Schmitt-Triggers an, der durch den rechten Operationsverstärker gebildet wird. 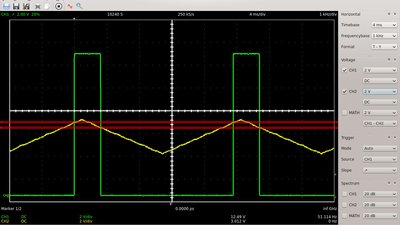
Die Höhe der Dreieckspannung kann durch Potentiometer Nummer 1 variiert werden. Überschreiten die Spitzen der Dreieckspannung die obere beziehungsweise untere Schaltschwelle des Schmitt-Triggers, kippt die Ausgangsspannung hin zur positiven beziehungsweise negativen Versorgungsspannung der Operationsverstärkers. 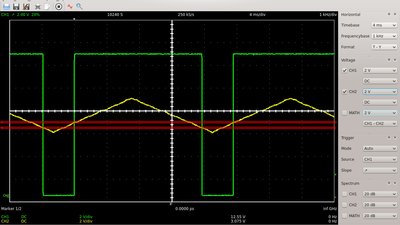
Die Pulsbreite des erzeugten Ausgangssignals steigt also mit steigendem Level der Dreiecksspannung. 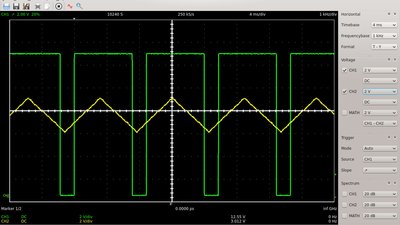
Die Schaltfrequenz kann durch Potentiometer Nummer 4 justiert werden. Je niedriger der Widerstand des Potentiometers, um so schneller läuft der Lade- beziehungsweise Entladevorgang des Kondensators ab, womit die Frequenz der generierten Dreieckspannung und somit auch die des Pulsweitensignals steigt. Da Frequenz und Tastrate von jeweils einem separaten Operationsverstärker generiert werden, können beide Parameter unabhängig voneinander justiert werden. Das Pulsweitensignal ist deutlich frequenzstabiler als bei dem einfachen Schaltkreis. 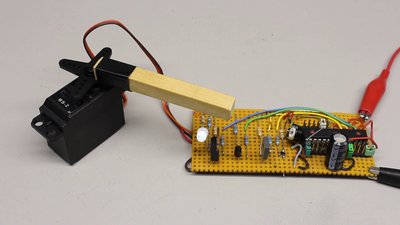
Eine sehr hohe Signalqualität in einem weiten Frequenzbereich kann bei Verwendung digitaler Signalprozessoren erzielt werden. Hier fungiert ein Atmega8A Prozessor als zentrales Element. Die Schaltfrequenz kann per Software oder manuell über Steckbrücken von wenigen Hertz hin zu mehreren hunderttausend Hertz präzise eingestellt werden. 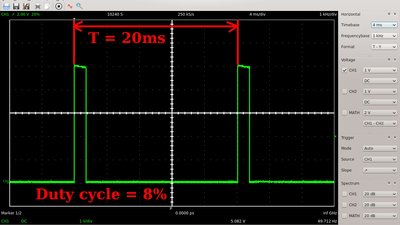
Die Ansteuerung von Servos erfolgt ebenfalls per Pulsweitenmodulation: Die Frequenz muss dabei 50Hz entsprechen und das Tastverhältnis im Bereich zwischen 5% und 10% liegen. So genügt zwischen dem Steuerelement und dem zu bewegenden Bauteil eine dreiadrige Leitung. In der Luftfahrt bezeichnet man diese Art der Ansteuerung dementsprechend als "Fly by Wire", also "Steuerung per Elektrokabel". Freilaufdiode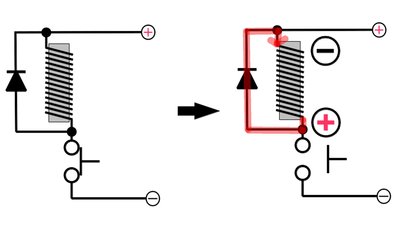
<<< Kippstufen Konstante Spannung >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|