|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt HUINA 1577 Gabelstapler (R9) - KonstruktionDas Video zum umgebauten GabelstaplerZu kaufen gibts den HUINA Gabelstapler auf Gearbest. Das Basisfahrzeug, der HUINA 1577
Der Gabelstapler ist etwa 50x17x30cm groß, besitzt einen schwarzen Metallrahmen mit einer orangefarbenen Karosserie aus Kunststoff und Gummireifen. Die Verarbeitung wirkt sehr vertrauenerweckend, es sind keine scharfen Ecken und Kanten auszumachen und alles ist sehr stabil. 
In dem Paket enthalten ist der Gabelstapler plus Fernsteuerung, ein USB-Ladegerät, drei Paletten aus Kunststoff, sowie die Gabeln und ein Kranaufsatz aus Metall. Die beiden Gabeln werden in die Hebemechanik eingeschoben und können wie bei den "Großen" Staplern in ihren Schienen hin- und hergeschoben werden. Der Kranaufsatz wird in der Mitte der Hebemechanik eingeschoben. Die Fernsteuerung benötigt zum Betrieb vier Batterien oder Akkus der Größe AA, die nicht im Lieferumfang enthalten sind. Der Fahrzeugakku besteht aus 6 Nickel-Cadmium-Zellen mit einer Nennspannung von 7.2V und einer Kapazität von 400mAh, der im Fahrzeugboden untergebracht ist. Umrüstung zum Rover R9Teileliste:
USB Kamera
Das geniale an der verwendeten USB-Kamera (gibt's hier zu kaufen Selbstverständlich lässt sich auch jede andere USB-Kamera mit Linux Unterstützung für einen Nachbau verwenden. Verwendung der originalen Platine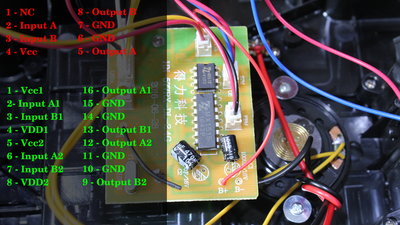
Ist kein Datenblatt zu den verbauten H-Brücken zu finden, muss das Pin-Layout durch messen und raten gefunden werden - wie im Video gezeigt: Dazu den Gabelstapler zunächst ausschalten. Die Pins der Ausgänge zu den Motoren können nun mit einem Multimeter in der Einstellung für Durchgangsprüfung gefunden werden. Zu hören ist, dass der Motor der Gabel mit den Pins 5 und 8 des kleinen Chips verbunden ist. Die Pins 9, 12, 13 und 16 des großen Chips, bei dem es sich offensichtlich um eine doppelte H-Brücke handelt, sind mit dem Fahrmotor verbunden. Jetzt den Gabelstapler einschalten und das Multimeter auf Spannungsprüfung stellen, wobei das schwarze Kabel mit dem Minuspol auf der Platine verbunden werden muss, der mit B- gekennzeichnet ist. Die Batteriespannung liegt an den Pins 8 und 4 des großen Chips und an Pin 4 des kleinen Chips an. Die Eingänge können identifiziert werden, indem der entsprechende Motor per Fernsteuerung aktiviert wird. Ist der Motor ausgeschaltet, so liegt keine Spannung an. In Vorwärtsrichtung liegt nur an dem einen Pin eine Spannung an bei Rückwärtsfahrt entsprechend nur an dem andern Pin. Somit handelt es sich bei 2, 3, 6 und 7 um die Eingänge des großen Chips und um Pin 2 und 3 an dem kleinen Chip. 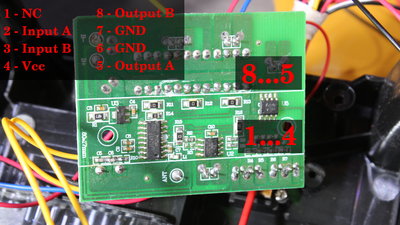
Der Chip für die Lenkung befindet sich auf der Unterseite und die Pinbelegung kann auf die gleiche Art herausgefunden werden. 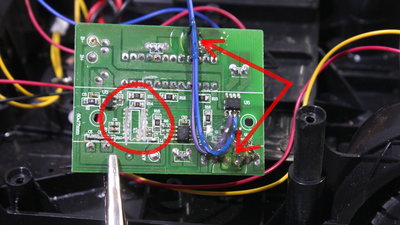
Sind die Eingänge der H-Brücken identifiziert, so muss der Mikrocontroller der Fernsteuerung von der Platine entfernt werden, da dieser ansonsten gegen den Raspberry Pi arbeitet! Ich habe einen Dremel verwendet, um die Pins abzuschleifen. Nach dem Entfernen unbedingt kontrollieren, ob dabei keine Kurzschlüsse auf der Platine verursacht wurden. An die Eingänge werden nun Kabel gelötet, um diese mit dem Raspberry Pi zu verbinden. Besonders bei dem kleinen Chip auf der Unterseite besteht die Gefahr, dass man beim Löten einen Kurzschluss verursacht! Das muss mit einem Multimeter in der Einstellung als Durchgangsprüfer getestet werden. Etwas Heißkleber verhindert, dass die Lötstellen wieder abgerissen werden. Schaltplan/Software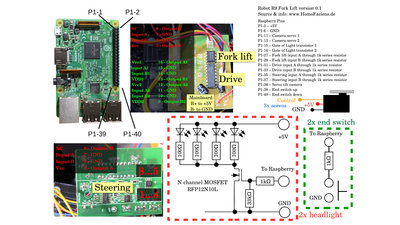
An der Software arbeite ich noch. Diese gibt's demnächst als Download-Paket zusammen mit den 3D-Dateien. 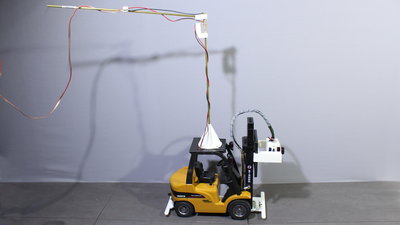
Die Zufuhr elektrischer Energie erfolgt über Kabel, damit ihr diesen Roboter rund um die Uhr in meinem RoboSpatium fahren könnt. Oben an dem Gabelstapler befindet sich eine Anti-Verdrill-Einrichtung für die Stromzufuhr. TestfahrtenR9 dreht in meinem RoboSpatium seine Runden. Dort könnt ihr diesen Roboter steuern.Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|