|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< R9 (Stapler) R11 Raspberry Pi >>> R10 - KonstruktionDas 1. Video zu R10MechanikR10 befindet sich noch in der Entwicklungsphase. Der erste Prototyp fährt bereits in meinem Roboterraum, aber es gibt noch viel zu tun, daher ist diese Dokumentation alles andere als vollständig.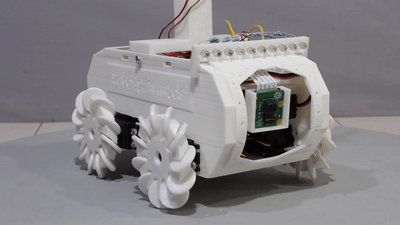
Die Mechanik von R10 entstammt dem 3D Drucker. Noch sind nicht alle Teile am Computer konstruiert und an den bestehenden Komponenten muss ich noch die ein oder andere Änderung vornehmen. Die 3D-Dateien gibt's als Downloadpaket. ElektronikTeileliste:Die elektronischen Bauteile habe ich von meinem Sponsor RS Components erhalten, daher verweisen die Links in der Tabelle zu deren Online-Shop.
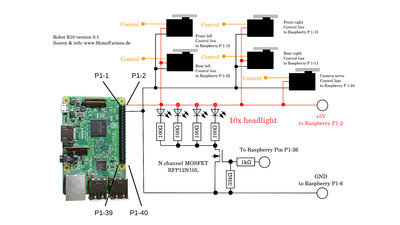
5 Servos, ein Raspberry Pi mit Kameramodul und LEDs zur Beleuchtung - die Elektronik ist recht übersichtlich. TestfahrtenWelche Roboter zur Zeit online sind und somit gesteuert werden können, seht ihr auf der Übersichtsseite in meinem RoboSpatium.<<< R9 (Stapler) R11 Raspberry Pi >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|