|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt Rover - KonstruktionBedienungsanleitung RoverSteuere den Rover Der Film zum KapitelTeileliste
Bauteile Infrarotschnittstelle
Rover 1.0Komponenten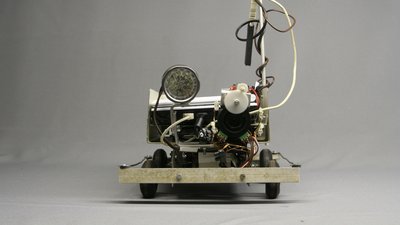
Der Entschluss zum Bau eines Rovers fiel recht spontan und die Umsetzung erfolgte fast vollständig mit bereits vorhandenen Materialien. Einzig eine Webcam wurde für die erste Umsetzung zugekauft. Später folgten dann noch zwei LED-Taschenlampen, um eine bessere Beleuchtung bei Nachtfahrten realisieren zu können. Die ursprüngliche Beleuchtung bestand aus einer 10W Halogenlampe, die jedoch viel zu ineffizient für ein derartiges Hightech-Fahrzeug ist und aus lediglich 4 blauen LEDs, die dem unten aufgeführten Computerlüfter entnommen waren (wer zum Teufel braucht einen beleuchteten Lüfter?!?). Das Chassis ist aus dem Blech eines Computergehäuses entstanden. Daran befestigt waren ursprünglich die Räder eines alten Spielzeugtraktors. Im Verlauf der Erprobung erwiesen sich die Gummis dieser Stollenreifen allerdings als zu alt und brüchig. Aus dem Flugmodellbau entliehene, deutlich härtere Räder verleihen dem Rover nun die ausreichende Fahrstabilität. Die Stoßstangen bestehen aus Aluminiumprofilen eines entsorgten Mini-Gewächshauses. 
Als Webcam dient eine Logitech C160 mit einer maximalen Auflösung von 640x480 Pixel. Die manuelle Fokussierung bei dem Rover erfolgt mit Hilfe eines Motors und Zahnrädern eines alten CD-Laufwerks. Als Anschlagschalter fungieren zwei Mikroschalter einer alten Computermaus. Die Abmessungen der Rovers betragen in etwa: 28x24x15cm (LxBxH) + 35cm Höhe für den Strommast. 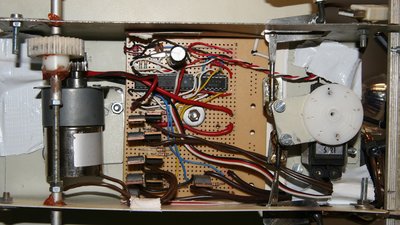
Als Antrieb dient ein Getriebemotor mit 12V Nennspannung, der jedoch nur mit 5V betrieben wird. Das angeflanschte Getriebe besitzt eine Untersetzung von 1:30 und mit dem Ritzel am Getriebe (10 Zähne) und der Achse (30 Zähne) ergibt sich eine Gesamtuntersetzung von 1:90. Die Lenkung wird von einem Servo vom Typ S21 übernommen. Die Verbindung zum "Zentralcomputer" stellt ein Mikrocontroller vom Typ Atmel, ein ATMEGA8-16PU her 
Bei dem "Zentralcomputer" handelt es sich um ein Edubook der Firma Norhtec, ein Mini-Laptop mit einer Bildschirmdiagonalen von 8.9Zoll, auf dem die Linux-Distribution KNOPPIX 6.2 läuft. Als Hauptprozessor ist eine Xcore86 CPU mit einer Taktgeschwindigkeit von 1GHz verbaut und diesem stehen 512MB Arbeitsspeicher zur Verfügung. Das gesamte System befindet sich auf einer sehr kleinen Platine. Keine "Höllenmaschine", aber zum Arbeiten brauch ich keine knallbunte Wisch- und Wusch- 3D-Benutzeroberfläche. Gute Computerarbeit läuft von der Kommandozeile! 
Etwas Kühlung verschafft dem an sich lüfterlosen Netbook ein Gebläse, da im Zielgebiet des Rovers bisweilen tropische Temperaturen herrschen. Außerdem handelt es sich bei dem hier zu sehenden Edubook um ein Vorserienmodell, das im Betrieb noch etwas heißer wird als die späteren Serienmodelle. Die Funkverbindung zur Basistation übernimmt ein USB-WLAN-Stick am Strommast des Rovers. Die beiden weiteren USB-Schnittstellen werden von der Webcam und der Steuerplatine verwendet. 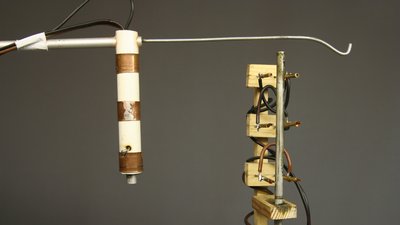
Die Stromversorgung erfolgt über ein altes Computernetzteil und nicht per Akkus. Ich habe keine Lust, einmal täglich zum Akkuwechsel durch's "Stargate" zu klettern. Benötigt werden 12V für das Edubook und 5V für die restlichen Komponenten, womit 3 Leitungen zum Rover führen. Damit sich das Fahrzeug nicht in seiner eigenen Stromzufuhr verheddern kann, erfolgt die Zuleitung über einen "Strommast" mit der hier zu sehenden Anit-Verdrill-Vorrichtung. An dem vorderen Haken kann ein Ausgleichgewicht eingehängt werden. 
Die Kabel werden außerdem mit Hilfe einer Umlenkrolle + Gegengewicht an einem Deckenbalken gestrafft. Als Zentralcomputer sind auch andere Lösungen wie der Open Source Computer "Pandaboard" denkbar, der lediglich 5V Betriebsspannung benötigt, womit zwei Zuleitungen genügen würden. Rover 2.0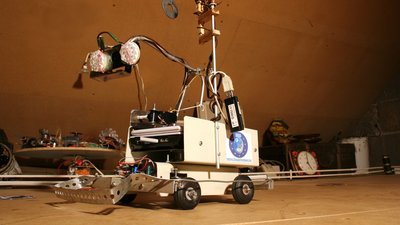
Inzwischen ist der Rover mit einer Full HD Webcam (Logitech C910) aufgerüstet worden. Diese Kamera verfügt über Autofocus, weswegen die manuelle Scharfstellung weggefallen ist. Um die Kamerahöhe ändern zu können, wurde die Kamera an einem beweglichen Arm befestigt. Der Arm wird dabei durch eine Seilwinde bewegt, die von einem Servo angetrieben wird. Zusätzlich kann der Blickwinkel durch ein weiteres Servo verändert werden. Die Beleuchtung wurde ebenfalls aufgerüstet und ab jetzt verfügt der Rover über insgesamt 38 weiße LEDs, die per Puls-Weiten-Modulation in ihrer Helligkeit geregelt werden können. 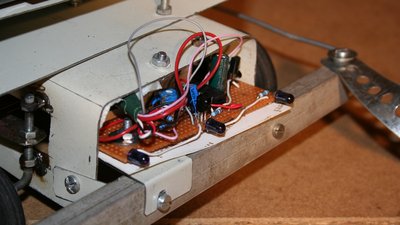
An der Vorderseite befindet sich eine weitere Neuerung - eine Infrarotschnittstelle. Diese besitzt sowohl ein Empfangsmodul, als auch Infrarot-Dioden zum Senden von Signalen. Hiermit kann der Rover mit anderen Mikrocontrollern kommunizieren. Im RoboSpatium befinden sich verschiedene Module (Globus, Drehtisch, Laptop), die über die Infrarotschnittstelle gesteuert werden können. ElektronikDie Verbindung zum Edubook verläuft über eine USB-Schnittstelle. Realisiert wurde diese mit Hilfe eines ATMEGA8-16PU und der Firmware der Firma Objective Development. Der Mikrocontroller steuert seinerseits die Peripherie über eine H-Brücke (Fahrmotor Vorwärts / Rückwärts), Drei Servos (Links/Rechts, Kameraposition), ein Leistungstransistor (Licht) und die Infrarotschnittstelle. Die Teileliste wurde auch hier von vorhandenen Komponenten in meinen Lagerschubladen bestimmt.
Die H-Brücke zur Steuerung des Fahrmotors ist alles andere als perfekt, aber funktionstüchtig. Nominell vertragen die Transistoren vom Typ DB650/649 Dauerströme von bis zu 8A, jedoch werden diese mit der hier verwendeten Anordnung nicht ganz sauber durchgeschaltet. Da der Blockierstrom des Fahrmotors bei 5V Spannung lediglich 400mA beträgt, erwärmen sich die Transistoren der Brücke nur unmerklich. Wer also einen leistungsstärkeren Motor betreiben möchte, sollte hier zu einer anderen Lösung greifen. Gleiches gilt für die den Transistor zur Lichtschaltung. Dieser wird über einen Vorwiderstand von 1kΩ direkt von dem Mikrocontroller-Ausgang betrieben und schaltet ebenfalls nicht ganz durch, was bei dem geringen Strom von circa 100mA kein Problem darstellt. Der 38kHz Schwingkreis zur Ansteuerung der IR-Sendedioden ist mit Hilfe eines Operationsverstärkers vom Typ MC34074P aufgebaut. Das Ausgangssignal ist nicht wirklich rechteckförmig, aber die Reichweite der Schnittstelle ist dennoch mehr als ausreichend. SteuersoftwareDie verwendete Software zum Betrieb des Rovers besteht aus einem Mix aus Javascript (Internetseite) Perl-Scripten (Kommunikation zwischen dem Server meines Providers und dem Rover) und C-Programmen (Schnittstelle Edubook und Rover). Die Quelltexte der Programme sind als Download erhältlich und ich möchte an dieser Stelle nur kurz auf die Kommunikation zwischen Rover und Server eingehen. Das Zielgebiet des Rovers liegt in weiter Ferne und die Funktionalität der Software sollte ohne Eingriffe vor Ort gewährleistet sein. Die Netzwerkkommunikation vom Rover zum Router (WLAN + dLAN) und vom Router zum Server kann unterbrochen oder zeitlich stark verzögert werden. Daher werden die Perl-Scripts zur Kommunikation ständig überwacht. Sowohl "rover-client.perl", als auch "rover-server.perl" schreiben an mehreren Stellen im Programmcode die aktuelle Zeit in eine Datei. Dieser "Zeitstempel" wird von einem weiteren Programm ausgelesen. Ist der Zeitstempel älter als 35 Sekunden, beendet das Überwachungsprogramm (watchdog-client.perl bzw. watchdog-server.perl) das Script und startet es neu. Treten beim Rover 5 Neustarts des Scripts rover-client.perl innerhalb von 5Minuten auf, wird ein Neustart des Betriebssystems initiiert. Die Netzwerkfunktionalität des Rovers wird zusätzlich von einem Script überwacht, das alle 2 Minuten per cron-job gestartet wird. Dieses Script setzt Ping-Signale an den Router und startet das WLAN neu, wenn kein Ping zum Router beantwortet wird. Derartige automatische Neustarts der Software oder gar des gesamten Betriebssystems sind bei Weltraumsonden nicht unüblich, denn die Steuerprogramme sind zum Teil recht komplex und daher nie ganz fehlerfrei. Die Perl-Scripts von Rover und Server übernehmen auch den Transfer der Bilder der Webcam zum Server. Gesteuert von Javascript wird alle 2 Sekunden das jeweils aktuelle Bild vom Server auf euren Computerbildschirm transferiert. Der Vorteil dieser Vorgehensweise ist, dass ihr keinerlei Zusatzprogramme installieren müsst, um den Rover steuern zu können.Auf dem Server liegen neben der Website die Dateien "rover-server.perl", "watchdog-server.perl" und "rover-status.pl". Der Server muss die Ausführung von Perl-Scripts zulassen! Auf der Festplatte des Rovers sind die Dateien "rover-client.perl", "watchdog-client.perl", "roverControl" und "rover-client-commands.perl", im Speicher des Mikrocontrollers befindet sich die Datei "main.hex". Noch Fragen zum Rover?Meine Mailadresse findet ihr im ImpressumNeuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|