|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< Roboterarm v1.0 WinchBot 1.5 >>> WinchBotDas Video zum KapitelTeilelisteEntstanden ist der WinchBot aus einer Kooperation mit RS-Components, daher sind in der Tabelle die Links zu deren Online-Shop gelistet.
Mechanik
Die Teile des WinchBot habe ich mit meiner CNC v3.2 aus 5mm Polycarbonat-Platten gefräst. Da sich dieser Kunststoff manuell nur sehr schwer bearbeiten lässt, ist 5mm Sperrholz zu empfehlen, wenn die Teile per Hand ausgesägt werden sollen. 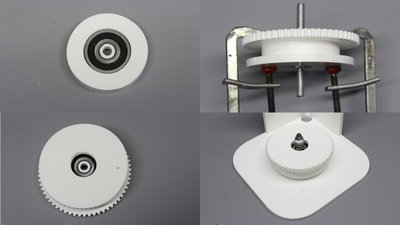
Die Trommel besitzt Kugellager der Abmessungen 10x9x30mm Nicht vergessen, eine 1.5mm Bohrung für die Befestigung des Stahlseiles zu setzen (links unten im Bild). 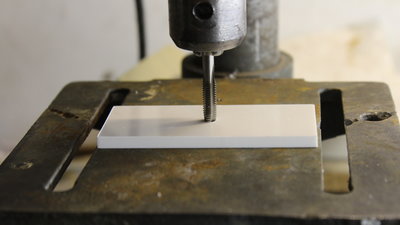
Einige Bohrungen müssen mit M6er Gewinde versehen werden. Die Gewindeschnitte gelingen senkrecht, wenn der Gewindebohrer in einer Ständerbohrmaschine eingespannt wird und das Bohrfutter per Hand gedreht wird. 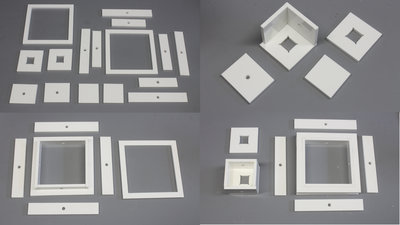
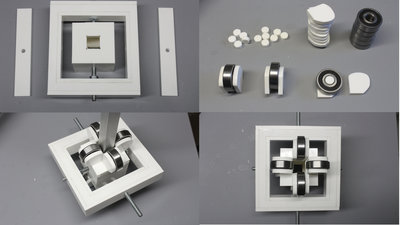



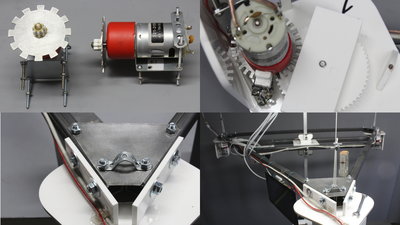
Die Sensorscheibe habe ich im Verlauf der Erprobung gegen eine Version mit 12 Zähnen und 7mm Zahnbreite ausgetauscht. Der Abstand der Gabellichtschranken muss 10 bis 11mm (von den Mittellinien der Sensoren gemessen) betragen. Auf der Abtriebswelle befindet sich ein Zahnrad mit 8 Zähnen. Anstelle der selbstgefrästen Zahnräder an Abtriebswelle und Windentrommel können Exemplare mit z.B. 80 und 12 Zähnen Modul 1 gekauft werden (siehe Teileliste). 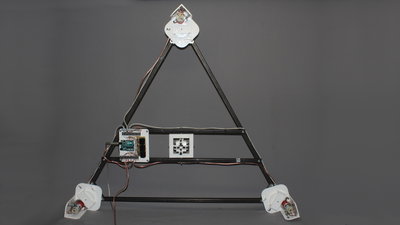
Den Rahmen habe ich aus 20x20x1000mm Eisen-Vierkantrohren aufgebaut, da ich diese vorrätig hatte. Aluminium-Vierkantrohre der gleichen Abmessungen ergeben einen leichteren Rahmen. 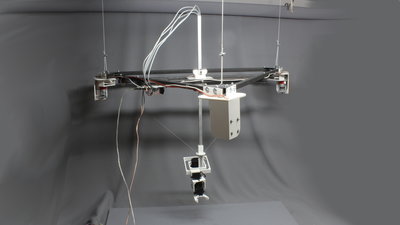
Aufgehängt ist der WinchBot an drei Seilen an der Zimmerdecke. Mathematik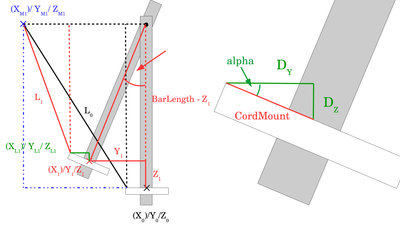
Zur Ansteuerung der Seilwinden müssen die X/Y/Z Koordinaten in Seillängen umgerechnet werden. Ferner müssen die Winkel des zentralen Vierkantrohres in der X/Z und Y/Z Ebene bekannt sein, um die Plattform mit dem Servoarm parallel zur Tischoberfläche ausrichten zu können. In Abbildung 12 ist die Y/Z Ebene gezeigt. Um den Winkel des Vierkantrohres mit dieser Ebene errechnen zu können, muss der Abstand der Seilaufhängung zum Drehpunkt des Vierkantrohres im Nullpunkt bekannt sein (BarLength). Im Nullpunkt ist der Winkel Alpha 0 Grad. Bewegt sich der Winchbot längs der Y oder Z-Achse, so ändert sich dieser Winkel und es gilt: alpha = atan(Y1 / (BarLength - Z)) Servo1 muss sich um diesen Winkel drehen, um die Grundplatte des Servoarmes weiterhin parallel zur Tischoberfläche auszurichten. 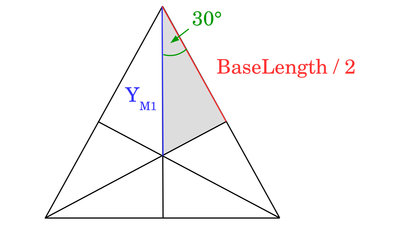
Der Rahmen des WinchBot besteht aus einem gleichseitigen Dreieck. Benötigt wird der Abstand von Motor 1 zum Mittelpunkt des Dreiecks, durch den das Vierkantrohr verläuft. In einem gleichseitigen Dreieck betragen alle Winkel 60°. In dem hellgrau gezeichneten Dreieck ist der obere Winkel 30°, womit für den Abstand gilt: YM1 = cos(30°) * (BaseLength/2) ZM1 entspricht der Länge des Vierkantrohres im Nullpunkt (BarLength). Benötigt wird nun die Abweichung DY und DZ, welche sich daraus ergibt, dass die Seile nicht in einem Punkt zusammenlaufen, sondern an einem Ring mit dem Radius "CordMount" (siehe Abbildung 12) befestigt sind. Für diese Abweichungen erhalten wir: DY = cos(alpha) * CordMount und DZ = sin(alpha) * CordMount Schließlich erhalten wir mit dem Satz von Pythagoras die Seillänge im Punkt XL1/YL1/ZL1: L1 = √ ( (YM1 - Y1 - DY)2 + (ZM1 - Z1 - DZ)2 ) Elektronik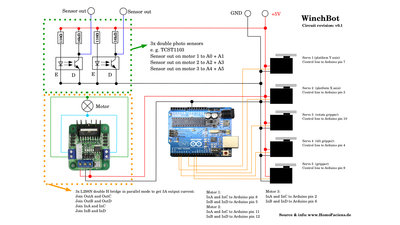
5 Servos, 3 Getriebemotoren, 3H-Brücken, 6 Gabellichtschranken und ein Arduino Uno werden für die Elektronik benötigt. Die Servos sind über geschirmte Leitungen verbunden. Die Abschirmung wird an einem Ende mit Masse des Arduino verbunden. Software / DownloadsDie Software gibt's in der Rubrik Download und diese läuft unter Linux von der Kommandozeile. Bestandteil des Paketes ist die Installationsanleitung und der Plan für die Bauteile.<<< Roboterarm v1.0 WinchBot 1.5 >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|