|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< Impressum ...to be continued. >>> Next3D von GoCNCVideo zur Next3DZu kaufen gibt's die Maschine auf GoCNC.de. Beschreibung
Die Next3D-Serie ist in verschiedenen Abmessungen erhältlich - da ich immer predige, dass kleiner besser ist, habe ich die Version "S", also die kompakteste Mechanik gewählt. Die Abmessungen der Mechanik betragen etwa 46x49x42cm bei einem Gewicht von 11kg und die Achsen können über 32x29.5x9cm bewegt werden. AufbauDiese Fotoserie ersetzt keinesfalls die Bauanleitung der Next3D! Meine Bilder sind lediglich als Ergänzung zu sehen.
Die Bauteile meiner Next3D im Überblick: Die Alu-Grundplatte mit T-Nuten ist als Extra erhältlich, ebenso der "G-Code Prozessor 3D" zur Ansteuerung der CNC über die USB-Schnittstelle. Die zur Montage benötigten Werkzeuge liegen dem Bausatz nicht bei - der Aufbau ist nichts für blutige Anfänger, ein wenig Erfahrung und eine Werkzeug-Grundausstattung sollten vorhanden sein. Gegen Aufpreis wird die Next3D auch komplett montiert geliefert. 
Die verbauten Schrittmotoren. 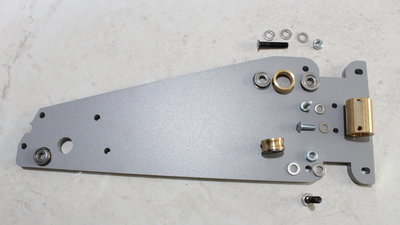
8mm starke Stahlplatten sorgen für die nötige Verwindungssteifheit. Messingrollen mit einzupressenden Kugellagern werden für die Führung verwendet. Ebenfalls aus Messing sind die Führungsmuttern der Gewindespindeln. 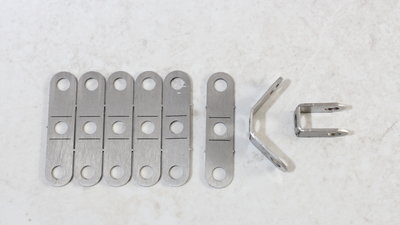
Aus 2mm Stahlplätchen werden U-Winkel gebogen. 
Zentralstück mit Führunsmuttern der X- und Z- Achse. 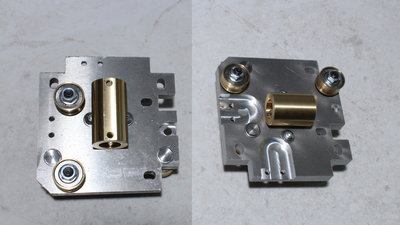
Fertig montiert. 
Mit den unten angebrachten Schrauben muss so viel Vorspannung auf die Führungsrollen gegeben werden, dass eine Seitenkraft von etwa 2kg benötigt wird, um die Mechanik zu bewegen. Nur so ist die Bewegung möglichst Spielfrei. 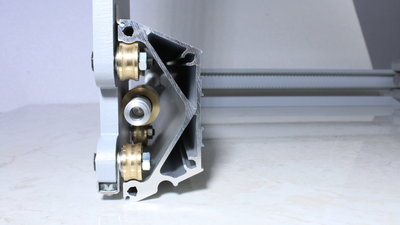

Die Spindeln der Y-Aches mit Zahnriemen. 
Nur ein Schrittmotor treibt beide Spindeln an, über den Zahnriemen wird die zweite Spindel der Y-Achse synchron mitgedreht 
An den Aluprofilen sind keine Gewinde. Diese werden beim Eindrehen der Schrauben "geschnitten", wozu etwas Öl auf die Schrauben gegeben werden muss. Die Sechskant-Aussparungen der Rundkopfschrauben sind etwas zu schwach und gehen beim Schneiden der Gewinde kaputt. Daher habe ich die Gewinde mit den robusteren Zylinderkopfschrauben geschnitten und anschließend die Rundkopfschrauben eingedreht. 
Zur Verkabelung wird kein Lötkolben benötigt. 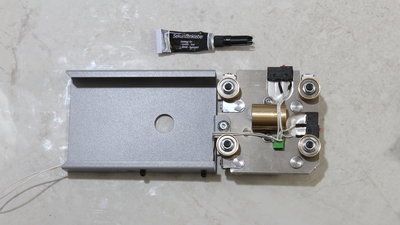
An einigen Stellen habe ich die Kabel mit etwas Sekundenkleber fixiert. 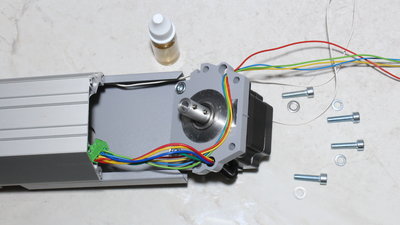
Drehmomentstarke Schrittmotoren treiben die Achsen an. 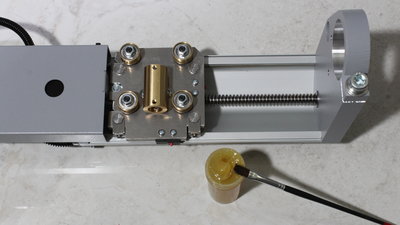
Die Spindeln und Laufflächen der Messingrollen müssen mit dem beiliegenden Fett bestrichen werden. 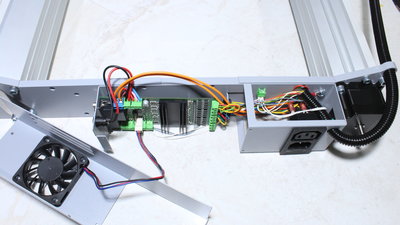
Die Treiberplatine für die Schrittmotoren ist im Bausatz enthalten - als Schnittstelle ist eine Buchse mit 25 Pins nach außen geführt, die üblicherweise mit dem Parallelport eines Computers verbunden wird. Rechenknechte sind heutzutage nicht mehr mit derartigen Schnittstellen ausgestattet, die Belegung der Pins ist in der Bauanleitung jedoch dokumentiert, womit eine beliebige Elektronik zur Ansteuerung aufgebaut werden kann. 
Die Alu-Grundplatte mit T-Nuten ist als Extra erhältlich. 
Ich habe zwei volle Tage für die Montage benötigt, dabei aber auch viele Fotos und ein paar Videos der Baufortschritte angefertigt. Gegen Aufpreis wird die Next3D auch komplett montiert geliefert. Alle Bilder, die ich während des Baus geschossen habe, gibt's als Download-Paket (61MB) Software
Ich verwende zur Ansteuerung der Next3D über die USB-Schnittstelle den als Extra von GoCNC erhältlichen "G-Code Prozessor 3D". Dabei handelt es sich im Inneren des Gehäuses um einen Atmega328P Mikrocontroller mit Arduino Bootloader, auf dem grbl in der Version 0.9 läuft. Grbl ist Open Source, die Firmware kann somit bei Bedarf jederzeit angepasst werden. 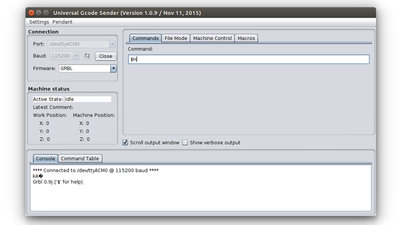
Als Software verwende ich den Universal Gcode Sender, ein auf Java basierendes Open Source Programm. Die Baudrate muss auf 115200 gesetzt und der Port muss ausgewählt werden. Als Betriebssystem läuft auf meinem alten Werkstatt-Laptop das Betriebssystem Linux Mint Version 18.3. Über den Befehl "$$" können die in grbl gespeicherten Parameter aufgerufen werden: **** Connected to /dev/ttyACM0 @ 115200 baud **** Grbl 0.9j ['$' for help] >>> $$ $0=10 (step pulse, usec) $1=25 (step idle delay, msec) $2=0 (step port invert mask:00000000) $3=2 (dir port invert mask:00000010) $4=1 (step enable invert, bool) $5=0 (limit pins invert, bool) $6=0 (probe pin invert, bool) $10=3 (status report mask:00000011) $11=1.000 (junction deviation, mm) $12=0.000 (arc tolerance, mm) $13=0 (report inches, bool) $20=0 (soft limits, bool) $21=0 (hard limits, bool) $22=1 (homing cycle, bool) $23=1 (homing dir invert mask:00000001) $24=500.000 (homing feed, mm/min) $25=500.000 (homing seek, mm/min) $26=250 (homing debounce, msec) $27=1.000 (homing pull-off, mm) $100=133.333 (x, step/mm) $101=133.333 (y, step/mm) $102=133.333 (z, step/mm) $110=4200.000 (x max rate, mm/min) $111=3000.000 (y max rate, mm/min) $112=4200.000 (z max rate, mm/min) $120=10.000 (x accel, mm/sec^2) $121=10.000 (y accel, mm/sec^2) $122=10.000 (z accel, mm/sec^2) $130=315.000 (x max travel, mm) $131=295.000 (y max travel, mm) $132=90.000 (z max travel, mm) ok Zu beachten ist, dass der Richtungsport der Y-Achse ($3=2) und die Richtung der Fahrt zum Endschalter an der X-Achse ($23=1) invertiert werden müssen. Mit dieser Konfiguration befindet sich der Nullpunkt links unten auf der Arbeitsfläche. Mit den Schaltflächen oder der Computertastatur kann die Fräse am linken unteren Punkt des jeweiligen Werkstücks aufgesetzt werden. Dann ist der Nullpunkt mit der Schaltfläche "Reset Zero" zu setzen. Nach Auswahl der Gcode Datei kann die Bearbeitung nun mit "Send" gestartet werden. Wann immer ein Fehler in der Maschinenbedienung auftritt, kann die Bearbeitung durch anklicken der Schaltfläche "Soft Reset" oder durch Ausschalten der Next3D gestoppt werden! <<< Impressum ...to be continued. >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|