|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt Lander 2 Kontrollzentrum auf dem Planeten Erde
Hier klicken, um die letzten 40 Fotografien zu sehen.Hier klicken, um die letzten 40 Fotografien nach dem Ende jeder Roverfahrt zu sehen.Nutzerstatistik:Bauanleitung:Die Nachbauanleitung inklusive der 3D Dateien und einem Video zur ferngesteuerten Kamera gibt's auf einer extra-Seite.Bedienungsanleitung:Die Anmeldung und prinzipielle Bedienung der Kameras ist so wie bei meinen fahrbaren Robotern. Solltet ihr noch nicht wissen, wie diese gesteuert werden, lest euch zunächst diese Bedienungsanleitung durch!
Wesentlicher Unterschied ist die Tatsache, dass diese Kamera nicht fahren, sondern lediglich geschwenkt werden kann. Kameraeinstellungen:
Brennweite: Je kleiner die Brennweite eines Objektives, um so größer der Blickwinkel, der von der Aufnahme abgedeckt wird. Die erste Aufnahme ist mit dem 6mm Objektiv entstanden... 
Brennweite: ...die zweite Aufnahme mit dem 16mm Objektiv. Es wird nur ein kleiner Ausschnitt der oberen Fotografie abgedekt, die darauf zu sehenden Objekte erscheinen dabei deutlich größer. 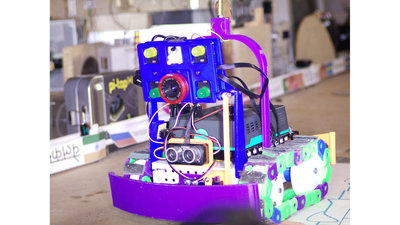
Fokus: Der Fokus der Kamera kann in einem Bereich von 10 bis 170 variiert werden. Die Angabe bezieht sich auf den Winkel des Servos, welches den Fokusring betätigt. 10 bedeutet, dass Gegenstände in einer Entfernung von etwa 10cm scharf abgebildet werden, eine Einstellung von etwa 140 bildet Gegenstände mit einem Abstand von etwa 4 Meter scharf ab. Da in der Mechanik eines Objektivs immer etwas Spiel vorhanden ist dieses durch die Betätigung über Servos deutlich vergrößert wird, macht es einen Unterschied, von welcher Richtung ihr euch auf einen Wert bewegt. Wird der Fokus z.B. auf "100" gestellt, ist dieser etwas näher an der Kamera, wenn der Fokus zuvor "50" betragen hat, als wenn der vorherige Wert "120" war. Nur der Fokus des 16mm Objektivs kann verstellt werden, der des 6mm Objektivs ist fest eingestellt. In dieser Abbildung ist der Fokus auf "140" gestellt, womit der Rover scharf abgebildet wird... 
Fokus: ...während der Fokus in dieser Abbildung auf "150" gesetzt ist und somit der Hintergrund scharf abgebildet wird. Klickt auf die Fotos, um den Effekt in voller Auflösung sehen zu können. Übernommen werden geänderte Einstellungen erst nach Anklicken der Schaltfläche "Set". Ihr müsst warten, bis ein neues Foto hochgeladen wurde, um den Effekt einer Änderung sehen zu können. 
Blende: Die Blendenöffnung bestimmt, welche Lichtstärke auf den Sensor trifft. Mit Hilfe einer Mechanik kann die Öffnung verkleinert werden, wobei ein größerer Blendenwert einer kleineren Öffnung entspricht. Auch bei der Blende entspricht der einzugebende Wert im Bereich zwischen 1 und 17 dem Drehwinkel des Servos (genau geommen einem zehntel davon). Der Wert 17 entspricht der auf deisem Foto zu sehenden kleinstmöglichen Öffnung. Je größer der Blendenwert, um so dunkler die Aufnahme. 
Blende: Neben der Helligkeit beeinflusst die Blendenöffnung auch die Schärfentiefe. Je kleiner die Blendenzuahl, um so geringer fällt der scharf abgebildete Bildbereich aus. Dieses Foto ist mit der kleinstmöglichen Einstellung "1" gemacht worden. Es ist lediglich der Bereich in der Bildmitte scharf abgebildet. 
Blende: Das selbe Motiv wurde hier mit der größtmöglichen Blendenzahl (kleinste Öffnung) von "17" aufgenommen. Zu sehen ist, dass ein wesentlich größerer Bereich des Motives scharf abgebildet wird. Der Verlust an Bildhelligkeit wurde mit Hilfe der Einstallungen für ISO und Belichtungszeit kompensiert. 
ISO: Der ISO-Wert bezeichnet die Lichtempfindlichkeit des Sensors. Je höher der eingestellte Wert, um so heller erscheint das Moltiv. Erlaubte Werte für den ISO-Wert sind 100, 200, 400 oder 800. Dieses Foto ist mit einem ISO-Wert von 100 aufgenommen... 
ISO: ...und dieses Foto mit ISO 800. Somit werden auch die zuvor dunklen Bereiche der Aufnahme besser sichtbar. 
Belichtungszeit: Die Belichtungszeit gibt an, über welche Zeitspanne Licht auf den Kamerasensor fällt, bevor die Bilddaten ausgelesen werden. Angegeben wird die Zeitspanne in Millisekunden (100ms = 0.1s). Je größer die Belichtungszeit, um so heller wird die Aufnahme. Dieses Foto ist mit einer Belichtungszeit von 50ms aufgenommen worden,... 
Belichtungszeit: ...während der Wert hier 1000ms, also 1 Sekunde beträgt. Neben dem beleuchteten Bildschirm ist nun die Schreibmaschine klar zu erkennen. Die Raspberry HQ Kamera kann Belichtungszeiten von bis zu 20 Sekunden verarbeiten, der Maximalwert bei dieser ferngesteuerten Kamera ist aber auf nur 1 Sekunde begrenzt, um die Kamera bis zum Senden der nächsten Aufnahme nicht zu lange zu blockieren. Bei langen Belichtungszeiten werden sich bewegende Objekte unscharf abgebildet. Um das zu demonstrieren werde ich wohl noch eine Pendeluhr im RoboSpatium installieren. Der Lander reagiert nicht wie erwartet?Die zur Kommunikation mit dem Rover ablaufenden Programme werden ständig überwacht. Kommt es zu einer Fehlfunktion, starten einzelne Programme oder das Betriebssystem des Landers neu. Nach spätestens 10 Minuten sollte die normale Funktionalität wiederhergestellt sein. Ist das nicht der Fall, schreibt mir doch bitte eine kurze Mail. Meine Adresse findet ihr in der Rubrik Impressum - danke!
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|