|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< R20 mail2code Stromschienen >>> R21 mail2code - KonstruktionDas Video zu R21Bemerkungen zu R21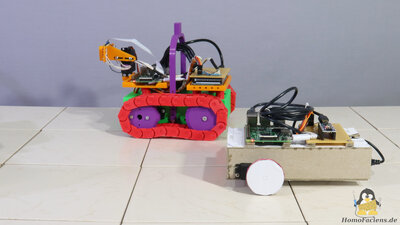
Nachdem ich euch in dem vorangegangenen Kapitel einen ersten Rover für mein mail2code System vorgestellt habe, der dem 3D Drucker entsprungen ist, möchte ich euch nun zeigen, dass solch ein Gefährt auch mit weitaus einfacheren Werkzeugen hergestellt werden kann. Die Mechanik von Rover R21 besteht überwiegend aus Pappe. Auch wenn der Kettenantrieb von R20 "cooler" aussehen mag, vom Lerneffekt bietet dieser keinen Mehrwert gegenüber den Pappscheiben von R21. Die Abmessungen sind ähnlich und beide Roboterplattformen bieten vielfältige Möglichkeiten, Erweiterungen an den Chassis anzubringen. Wer programmieren lernen möchte oder einfach mal neugierig ist, wie mail2code funktioniert, hier geht's zur Projektseite von mail2code. Bau der Mechanik
Grundmaterial von R21 ist 2mm Pappe, die mit einem scharfen Messer oder einer Schere sehr leicht zugeschnitten und mit Klebstoff verbunden werden kann. Möglich sind auch 2-3mm Sperrholz oder 2mm Kunststoff - beides Materialien, die ebenfalls mit einem Messer zugeschnitten werden können, wenn auch nicht ganz so leicht. Der Bauplan kann entweder per Lineal und Stift auf die Pappe übertragen, oder einfach aufgeklebt werden. Als Klebstoffe eignen sich Heißkleber oder Sekundenkleber, wenn's schnell gehen soll oder Weißleim für Menschen mit etwas mehr Zeit. 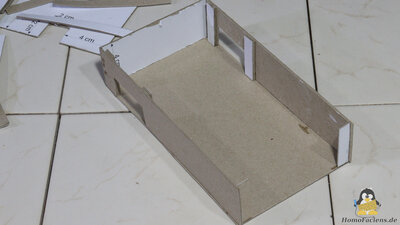
Für das Chassis werden die Teile nach dem Ausschneiden zu einer Schachtel zusammengeklebt. 
Daran angeschraubt werden die beiden Servos für kontinuierliche Rotation, die als Antriebsmotoren dienen. Die Schraubenlöcher müssen mit einem 1.5mm Bohrer oder wie hier mit einem sehr kleinen Schraubendreher vorgebohrt werden. Die Räder bestehen aus zusammengeklebten Pappscheiben mit einem Durchmesser von 45mm, die wiederum an die Servohörner geklebt werden. Für bessere Traktion habe ich die Räder nach ersten Tests verbreitert und mit Reifen aus Gummiringen ausgestattet. 
Hinten am Chassis ist ein Schleifsporn angeklebt. 
Fehlen noch Befestigungspunkte für den Raspberry Pi und den Mikrocontroller - diese bestehen aus einem Stapel Pappstücke, in die Schrauben gedreht werden können. Der Raspberry Pi ist vorne am Chassis befestigt, der Mikrocontroller hinten - hier habe ich ein günstigeres Nano-Board mit einem ATmega328 Mikrocontroller verbaut. Teileliste:Durch den Kauf von Bauteilen über die von mir angegebenen Affiliate-Partnerlinks in der Tabelle (oder in den Bannern auf meinen Seiten) unterstützt ihr meine Projekte - vielen Dank! Die Links anzuklicken bedeutet allerdings keinen Kaufzwang - völlig ungezwungenes Stöbern ist möglich ;-) Meine frei zugängliche Bildungsplattform ohne einzukaufen mit Hilfe einer Spende oder als Patreon zu unterstützen, geht natürlich auch. Vielen Dank an alle, die mir bereits einen Obolus haben zukommen lassen!
Elektronik
Die unbedingt notwendigen elektronischen Komponenten sind für beide Fahrzeuge gleich und bestehen aus einem Raspberry Pi, zwei Servos für kontinuierliche Rotation, einer Powerbank und einem Mikrocontroller. Ein ATmega2560 Board wie bei R20 kann natürlich auch verwendet werden - kleiner und günstiger passt nach meinem Empfinden aber besser zu dem Roboter aus Pappe. Für die Elektronik, die in der einfachen Ausbaustufe lediglich aus Steckkontakten für die Servos und ein paar Widerständen besteht, habe ich eine Lochrasterplatine verwendet, die noch Platz für Erweiterungen besitzt. 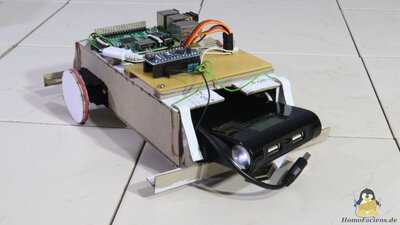
Die Powerbank zur Energieversorgung wird von hinten in das Chassis eingeschoben. Von der Powerbank führt ein Ausgang zum Raspberry Pi und der zweite zu den Servos. Raspberry Pi und Mikrocontrollerboard sind ebenfalls per USB-Kabel verbunden. 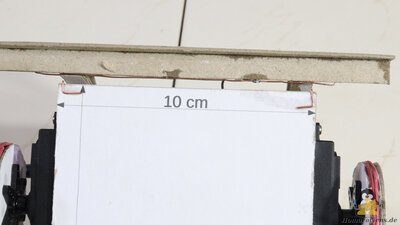
Als erstes Upgrade verpasse ich dem Roboter Stoßstangen mit Schaltern, über die erkannt werden kann, ob der Rover gegen ein Hindernis gefahren ist. Auf der Rückseite der Papp-Stoßstange, befindet sich ein mit Masse verbundener Draht. 
An den Ecken des Chassis sind die Draht-Gegenstücke, die zu GPIO Pins an dem Mikrocontroller führen. Diese simplen Schalter werden geschlossen, sobald der Rover gegen ein Hindernis stößt. Software / DownloadDen Schaltplan und die Konstruktionszeichnungen gibt's als Download.Die Software ist noch nicht wirklich fertig. Wie's prinzipiell funktioniert, gibt's auf den Seiten von mail2code nachzulesen. TestfahrtenWelche Roboter zur Zeit gesteuert werden können, seht ihr auf der Übersichtsseite meines RoboSpatiums.<<< R20 mail2code Stromschienen >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|