|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< Gleichstrommotor (elektrisch erregt) Wechselstrommotor >>> SchrittmotorDas Video zu SchrittmotorenAllgemeinesSchrittmotoren sind elektrische Motoren, die Bewegung nicht kontinuierlich ausführen, sondern in einzelnen Schritten. Die Rotation kann derart gesteuert werden, dass sich die Motorwelle zu einem der Schritte bewegt und dort verharrt, bis der Befehl zum nächsten Schritt erfolgt. Zur Steuerung eines Schrittmotors wird kein Sensor für die aktuelle Rotorposition benötigt.Bipolarer SchrittmotorEin bipolarer Schrittmotor besitzt üblicherweise 4 Motoranschlüsse. Je zwei dieser Anschlüsse sind intern mit einer Spule oder auch einer Gruppe von Spulen, welche parallel oder in Reihe geschaltet sind, verbunden. Ein derartiges Paar von Motoranschlüssen wird als Phase bezeichnet. Für die 4 Anschlüsse ergeben sich die in der Tabelle gelisteten Möglichkeiten zur Beschaltung:
Der Motor führt einen Halbschritt aus, wenn die Spannungen an den Motoranschlüssen entsprechend einer benachbarten Tabellenspalte geändert werden. Die Drehrichtung eines Schritts hängt davon ab, ob man sich dabei von links nach rechts oder von rechts nach links durch die Tabellenspalten bewegt. Werden die Grün hinterlegten Tabellenspalten übersprungen, so führt der Motor einen Vollschritt aus. Werden alle Rot hinterlegten Tabellenspalten übersprungen, so führt der Schrittmotor ebenfalls Vollschritte aus. Dabei sind jedoch stets beide Phasen an die Spannungsquelle angeschlossen. Diesen Modus bezeichnet man als 2-Phasen-Steuerung. Der Vorteil dieses Steuerverfahrens liegt darin, dass ein höheres Drehmoment erzeugt wird, wenn stets alle Elektromagnete eingeschaltet bleiben. Der Nachteil liegt in dem doppelten Strom durch den Motor verglichen mit dem Einphasen-Vollschritt-Betrieb. 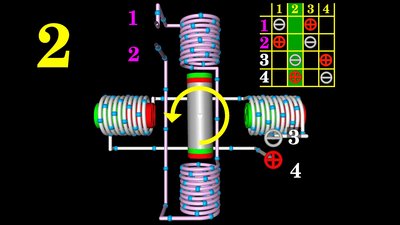
Schrittmotor mit 2 Polen am Rotor. Ist wie hier Minus der Spannungsquelle an Anschluss 3 des Motors und Plus an Anschluss 4, so richtet sich der Rotor längs der horizontalen Achse mit dem Südpol nach links zeigend aus. Der Rotor dreht sich folglich um 90 Grad entgegen dem Uhrzeigersinn. 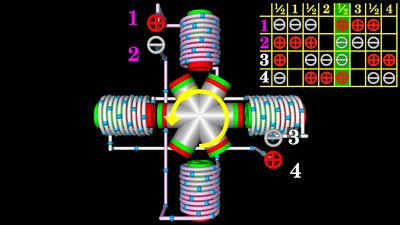
Schrittmotor mit 6 Polen am Rotor. Der Schrittwinkel entspricht der Rotation der Motorwelle während eines Schritts, gemessen in Grad. Je höher die Anzahl der Permanentmagnete auf dem Rotor, um so kleiner die der Schrittwinkel. Im Vollschrittverfahren ergeben sich bei dem hier zu sehenden Motor mit 6 Polen am Rotor 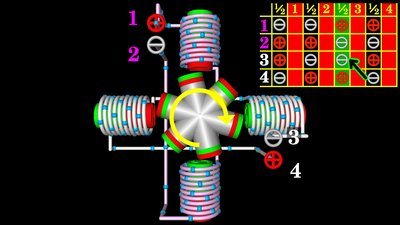
Schrittmotor mit 6 Polen am Rotor im Zweiphasen Vollschrittmodus. In diesem Modus sind beide Phasen ständig eingeschaltet und von einem Schritt zum nächsten wird die Polung einer der beiden Phasen geändert. Der Schrittwinkel beträgt 30 Grad, ist also gleich dem im normalen Vollschritt-Modus. 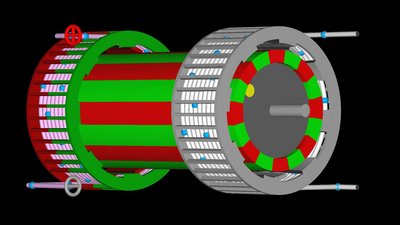
Eine besondere Bauform eines bipolaren Schrittmotors ist der sogenannte Can-Stack Schrittmotor. Eine Phase besteht aus einem Spulendraht, der auf einer Trommel aufgewickelt ist. Die Trommel besitzt auf der Innenseite Klauen, welche im Betrieb die Pole des Stators bilden. Fließt ein Strom durch die Statorspule, so bilden sich magnetische Pole an den Klauen der Trommel. Beide Statortrommeln besitzen die gleiche Anzahl Pole und die Klauen sind zueinander so ausgerichtet, dass zwischen beiden Trommeln ein Winkel von einem halben Klauenabstand besteht. Der hier zu sehende Motor besitzt 16 Pole pro Statortrommel, womit sich ein Winkel von 11.25 Grad zwischen den Trommeln ergibt. Der Rotor besteht aus einem Permanentmagneten, der die gleiche Anzahl Pole wie eine Statortrommel also in dieser Zeichnung 16 Pole besitzt. Mit jedem Schritt bewegt sich die Motorwelle derart, dass sich die Pole des Rotors bündig zu den Polen der jeweils eingeschalteten Statortrommel ausrichten. Die Nordpole des Rotors liegen dabei den Südpolen der Statortrommel gegenüber. Wann immer Phase 1 eingeschaltet ist, ist Phase 2 ausgeschaltet. Wegen des Winkels von 11.25 Grad - also einem halben Polabstand - zwischen den Zähnen beider Trommeln, dreht sich der Rotor mit jedem Schritt um genau diese Gradzahl. Der Motor kann der Tabelle oben folgend im Vollschritt-, Halbschritt oder 2-Phasen Modus betrieben werden. Unipolarer Schrittmotor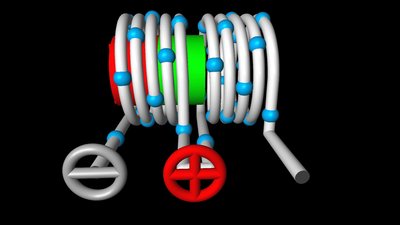
Die hier zu sehende Spule besitzt einen zusätzlichen Anschluss in der Mitte des Spulendrahtes, der ständig mit Plus der Spannungsquelle verbunden ist. Wird das linke Spulenende mit Minus der Spannungsquelle verbunden, so fließt nur durch die linke Hälfte der Spule ein Strom und der magnetische Nordpol bildet sich am linken Ende der Spule. 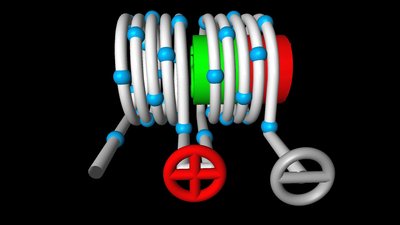
Wird das rechte Ende des Spulendrahtes mit Minus der Spannungsquelle verbunden, so fließt ein Strom durch die rechte Hälfte der Spule und es bildet sich der magnetische Nordpol auf der rechten Seite der Spule. Mit der Anzapfung in der Spulenmitte kann die magnetische Polung des Elektromagneten vertauscht werden, ohne die elektrische Polung an den Anschlüssen ändern zu müssen. 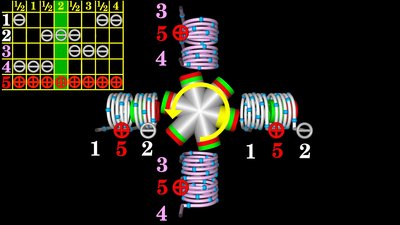
Ein unipolarer Schrittmotor besitzt üblicherweise 5 Anschlüsse. Die zentralen Anzapfungen (mittlere Anschlüsse) sind mit dem Pluspol der Spannungsquelle verbunden. In der Abbildung sind die beiden horizontalen Spulen parallel verschaltet. Die linken Enden beider weiß markierten Spulen (1) sind im Motorinneren miteinander verbunden. Gleiches gilt für die rechten Enden (2) der Spulendrähte. Nach diesem Prinzip sind auch die Anschlüsse (3) und (4) der magentafarbenen Spulen verbunden. Zur Ansteuerung eines unipolaren Motors mit 5 Motoranschlüssen kann das folgende Schema verwendet werden:
Im Halbschritt sind jeweils 4 von 8 Spulenhälften eingeschaltet (50%). Unipolare Schrittmotoren nutzen nur die halbe Spulenwicklung, womit weniger Drehmoment zur Verfügung steht, um den Motor zu bewegen oder in Position zu halten. Um (nahezu) das gleiche Drehmoment wie mit einem bipolaren Motor zu erhalten, ist die doppelte Anzahl an Wicklungen nötig, womit unipolare Schrittmotoren etwas größer ausfallen. ReluktanzschrittmotorReluktanz oder auch magnetischer Widerstand ist ähnlich dem ohmschen Widerstand in einem elektrischen Stromkreis. Der Rotor eines Reluktanzmotors besteht aus einem ferromagnetischen Material mit geringer Hysterese (z.B. Weicheisen). Der magnetische Widerstand von Eisen ist deutlich kleiner als der von Luft. Wird eine der Statorspulen eingeschaltet, so wirkt das entstehende Drehmoment in die Richtung, welche die Größe des Luftspaltes zu verringern sucht, um somit die Reluktanz des gesamten magnetischen Kreises zu verringern.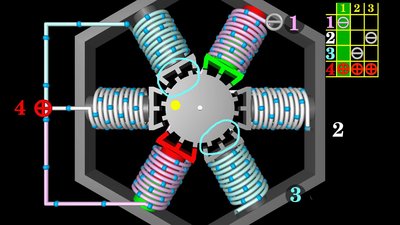
In der Abbildung ist Phase 1 des Motors eingeschaltet. Soll sich der Motor im Uhrzeigersinn drehen, so muss als nächstes die Phase 3 an die Spannungsquelle angeschlossen werden. Ein Reluktanzmotor besitzt üblicherweise 3 Phasen und somit 4 Anschlüsse. Ein Anschluss (4) ist mit einem Ende aller Spulen in dem Motor verbunden. Dieser Anschluss ist im Betrieb ständig mit Plus der Spannungsquelle verbunden. Die 3 verbleibenden Anschlüsse (Phasen) werden abwechselnd mit Minus der Spannungsquelle verbunden:
Reluktanz-Schrittmotoren sind daher unipolare Motoren. Hybrid-Schrittmotor
Der Rotor eines Hybrid-Schrittmotors besteht aus einem Permanentmagneten mit Zahnkränzen aus magnetisch weichem Eisen an den Polen. 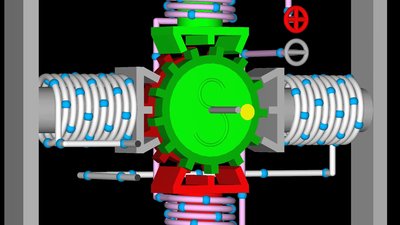
Die Aktivierungssequenz der beiden Phasen ist identisch zu der des weiter oben behandelten bipolaren Schrittmotors. Wann immer eine Phase eingeschaltet wird, richten sich die Zähne des Rotors welche am Südpol des Permanentmagneten befestigt sind, bündig zu den Zähnen des Elektromagneten aus, welche am Stator einen magnetischen Nordpol bilden (untere Statorspule in der Abbildung). Im Gegensatz dazu bilden die hinteren Rotorzähne in dieser Abbildung magnetische Nordpole, die sich bündig zu den Zähnen der Statorspule ausrichten, welche einen magnetischen Südpol bildet. 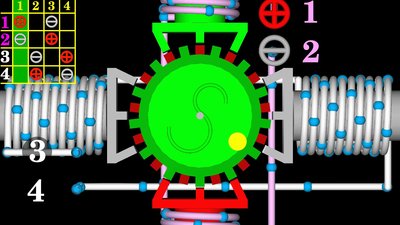
Die Frontalansicht verdeutlicht die Ausrichtung der Zähne zueinander. Der Rotor in dieser Abbildung besitzt 26 Pole. Mit jedem Schritt bewegt sich der Rotor um die Hälfte des Winkels zwischen zwei Polen, also um etwas weniger als 7 Grad. 52 Schritte werden für eine Umdrehung der Motorwelle benötigt. Mit einem Halbschritt dreht sich die Motorwelle um weniger als 3.5 Grad, womit 104 Halbschritte für eine volle Umdrehung benötigt werden. <<< Gleichstrommotor (elektrisch erregt) Wechselstrommotor >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|