|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< Insta360 Air London Taxi TX2 >>> Gleichstrommotoren im GeneratorbetriebDas Video zum KapitelMotivationDas hier gezeigte Experiment habe ich in Angriff genommen weil:

Den Saito FA40 Viertaktmotor hatte ich schon vor Jahrzehnten für ein RC-Modellflugzeug gekauft, das nach allzu harten Landungen mittlerweile entsorgt ist. Die Gleichstrom-Getriebemotoren sind bei meinem WinchBot-Projekt übrig geblieben und die sonstigen Kleinteile sollten in keinem guten Haushalt fehlen... Versuchsaufbau
Als elektrische Generatoren verwende ich Getriebe-Gleichstrommotoren, die ich von Projekten mit meinem Sponsor RS Components übrig behalten habe. Als Rechenknechte kommen ein Raspberry Pi Model B+, eine SIMATIC IOT2020 und ein Arduino Uno in meinen Experimenten zum Einsatz. Ein 2x16 Zeichen LCD dient zur Anzeige von Messdaten. Auf dem Brett mit dem Versuchsaufbau befinden sich zwei Gleichstromgetriebemotoren. 
Der erste Motor, der über eine Handkurbel angetrieben wird, besitzt eine Übersetzung von 1:50, das bedeutet eine Umdrehung der Handkurbel bewirkt 50 Umdrehungen der Motorwelle. 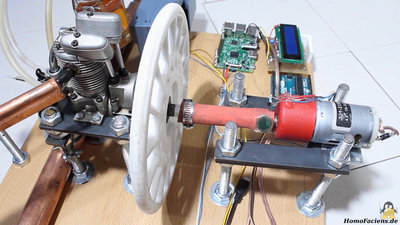
Der zweite Motor, dessen Übersetzung 1:2.5 beträgt, wird von einem Viertakt-Verbrennungsmotor angetrieben. Die Kurbelwelle des Verbrennungsmotores ist über ein Stück Gummischlauch mit der Abtriebswelle des Elektromotors verbunden. Beide Motoren sind nur per Augenmaß fluchtend zueinander ausgerichtet und der Gummischlauch gleicht den Versatz aus. Außerdem puffert diese flexible Verbindung die durch den Viertakter verursachten Vibrationen ab. An einem Gleichspannungsnetzteil habe ich an den Computern unter meinen Versuchsbedingungen mit dem LCD-Display die folgenden elektrischen Daten gemessen:
ElektronikTeileliste:Die elektronischen Bauteile habe ich von meinem Sponsor RS Components erhalten, daher verweisen die Links in der Tabelle zu deren Online-Shop.
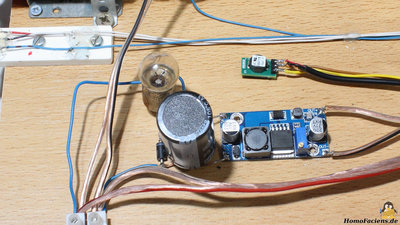
Die von den Elektromotoren im Generator-Betrieb abgegebene Gleichspannung wird von einem Step-Up-Konverter für den Arduino und die SIMATIC auf 12V hoch-, für den Raspberry Pi über einen step-down Konverter auf 5V heruntergeregelt. Dem Konverter vorgeschaltet ist ein Spannungsteiler bestehend aus einer 9.1V Zenerdiode und einer Glühbirne - damit wird eine zu hohe Ausgangsspannung an den Generatoren abgefangen. Ein Elektrolytkondensator mit 10mF Kapazität glättet die Eingangsspannung am jeweiligen Gleichspannungskonverter. 
Mit einem Hall-Sensor und einem Magneten an der Kurbel beziehungsweise an der Kupplung zum Verbrennungsmotor kann die Umdrehungsgeschwindigkeit gemessen werden. 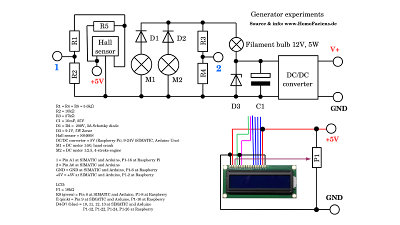
Schaltplan und verwendete Software sind als Download-Paket erhältlich. <<< Insta360 Air London Taxi TX2 >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|